MAVLink 设置
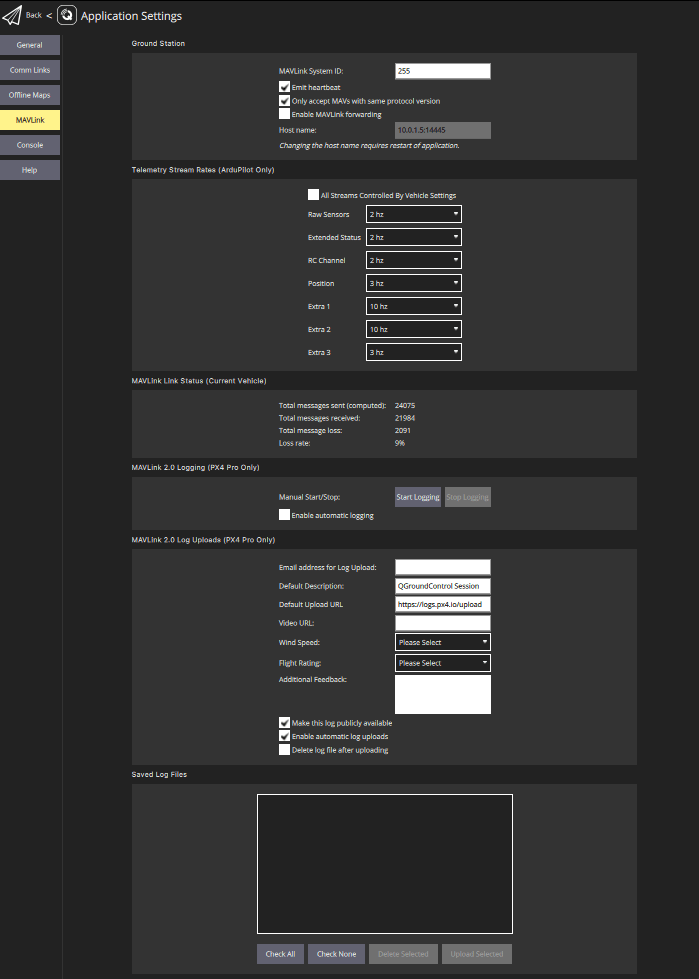
MAVLink 设置 (设置视图 > MAVLink) 允许您配置选项和查看针对MAVLink通信的信息。 这包括设置 QGroundControl 的 MAVLink 系统ID,并查看链接质量。
该屏幕还允许您管理MAVLink 2日志流传输(仅适用于PX4),包括_自动将日志上传至飞行评估_!
地面站
本节设置 _QGroundControl_的 MAVLink 属性和行为。
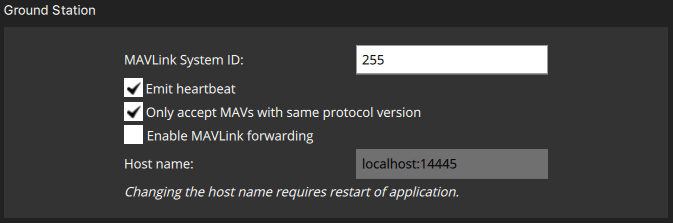
- MAVLink 系统ID: MAVLink 网络上的 QGroundControl 系统 ID (默认:255)。 载具通常从1处配给标识符。 如果网络上有多个地面站或MAVLink应用,您可能需要指定另一个ID。
- 发送心跳:禁用定期发送MAVLink心跳消息(默认值:True)。 一般来说,你不应该关闭这个功能。
- 只接受具有相同协议版本的 MAVs: 设置为 true 仅连接到 MAVLink 1 或 MAVLink 2 载具(默认:True)。
- 启用 MAVLink 转发: 启用 QGroundControl 来将 MAVLink 消息从已连接的车辆转发到另一个 UDP端点(默认: False)。 请注意,此转发是单向的:从QGC到指定的主机。 从指定主机收到的任何MAVLink消息将被忽略。
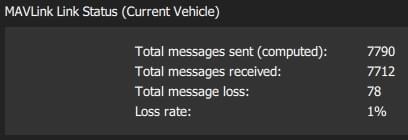
链接状态
这显示了通过通信链接传输MAVLink消息的状态。 高丢失率 可能会导致对参数下载或任务上传/下载等事项的协议错误。
MAVLink 2 日志(仅PX4)
MAVLink 2 日志 设置 (PX4) 配置从 PX4 到 QGroundControl 的实时日志流量,并将日志上传到 飞行评论。
WARNING
MAVLink 2 日志不能用于"基本"设置,因为它需要一个与载具的常用高率的 MAVLink 连接(它可以在 WiFI 上工作,但将在 Telemetry 链接上工作)。
TIP
在理论上,流媒体允许实时分析数据。 在编写实时分析报告时,尚未实施。
日志格式与 SD 卡日志相同(使用 分析视图 > 日志下载 下载)。 但实际记录的数据可能略有不同,因为日志开始/停止时间是由 QGroundControl 控制的,并且因为在光滑通道流媒体时可能出现一些退出。
MAVLink 2 日志 部分允许您手动启动和停止日志记录并启用自动捕获日志。
“MAVLink 2日志上传”部分允许您配置将MAVLink日志上传到飞行评估。 您可以指定否则您必须直接输入站点的所有字段。 并选择日志是自动还是手动上传。
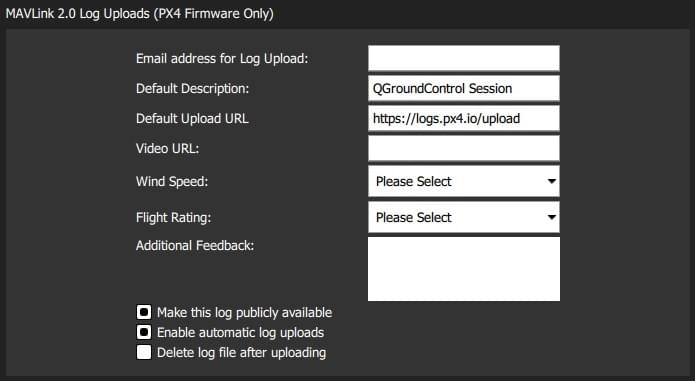
字段为:
- 日志上传的电子邮件地址: 飞行评估 将给您发送一个链接到此地址上传。 这很重要,因为否则您将无法在上传后访问非公开的日志。
- 默认描述: 用于日志的飞行描述/名称。
- 默认上传URL: 上传日志/日志元数据的 URL。 默认设置为 飞行评估 URL。
- 视频 URL: (可选) URL,用于与日志相关的飞行视频。 为了便于分析,可将此内容列入飞行审查页。
- 风速: 用于帮助调试和过滤(多次飞行)。 允许的值: Calm | Breeze | Gale | Storm。
- 飞行评级: 用于帮助调试和过滤(多次飞行)。 允许的值:Crashed (Pilot Error) | Crashed (Software or Hardware Issue) | Unsatisfactory | Good | Great。
- 附加反馈: (可选)。 输入更详细的飞行或行为描述。
- 公开显示此日志: 如果设置,日志将在_飞行评估_上可见并可搜索。 如果没有设置,它将只能通过上传上传的电子邮件链接获得。
- 启用自动上传日志: 如果设置,日志将自动上传完成。
- 上传后删除日志文件: 如果设置,上传后日志将自动删除。
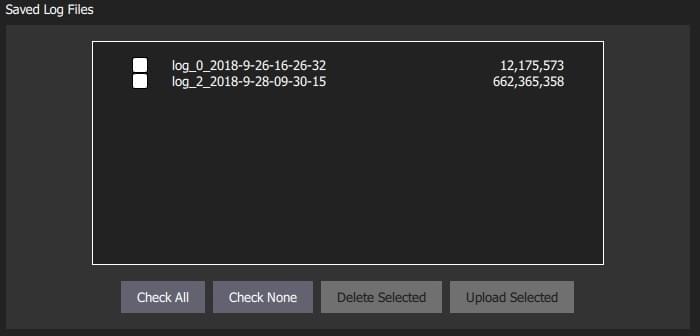
_保存的日志文件_部分用于手动管理日志上传。 使用复选框和按钮选择日志,并删除或上传日志。
TIP
您可以更改上面_MAVLink 2 日志上传的参数,以指定上传日志的单独描述。