QGC v4 版本说明
WARNING
现在在Github 发布页面跟踪发布笔记。 v4.0.0后的更改信息请查看该页面。
稳定版本 4.0
INFO
QGC 中设置的格式必须在此版本中更改。 这意味着所有 QGC 设置将被重置为默认值。
- 设置
- 语言:允许选择语言
- 可选的CSV 日志遥测数据以提高访问性。
- ArduPilot
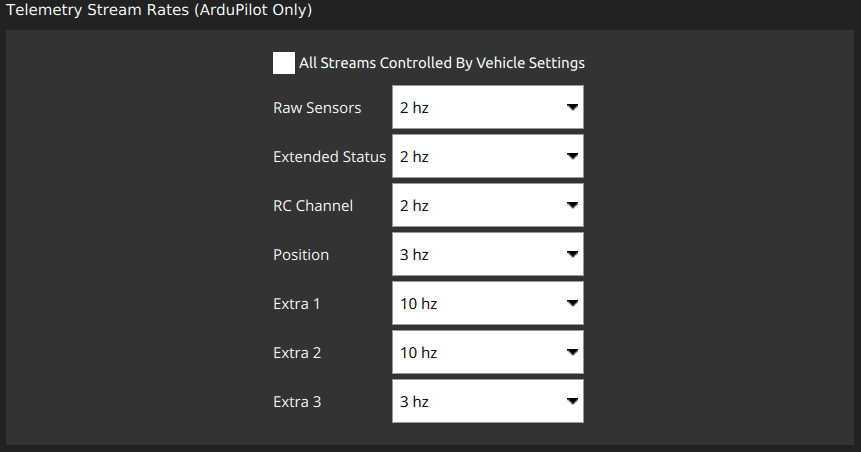
- 支持可配置的 mavlink 流速率。 可从 Settings/Mavlink 页面获取。
- 改进对 ChibiOS 固件刷入的支持
- 对连接到 ChibiOS 引导加载程序板的支持得到改进。
- 支持可配置的 mavlink 流速率。 可从 Settings/Mavlink 页面获取。
- 配置
- 手柄
- 新摇杆设置 ui
- 能够配置按住按钮进行单次或重复操作
- ArduPilot
- 电机测试
- ArduSub
- 电机方向自动检测
- ArduCopter
- PID 调节支持
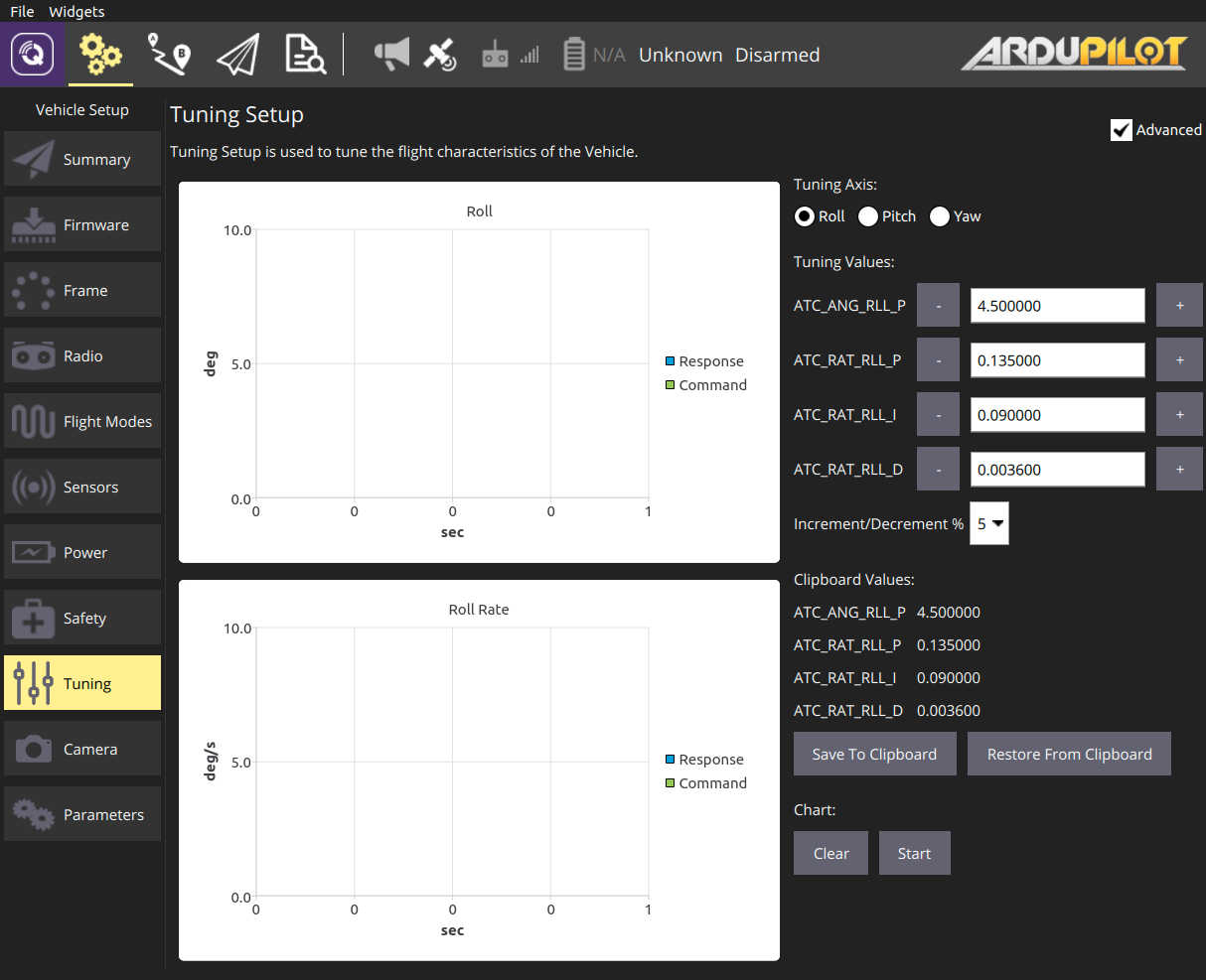
- 附加基本调整选项

- 多旋翼飞行器 / 地面车辆 - 机架设置用户界面 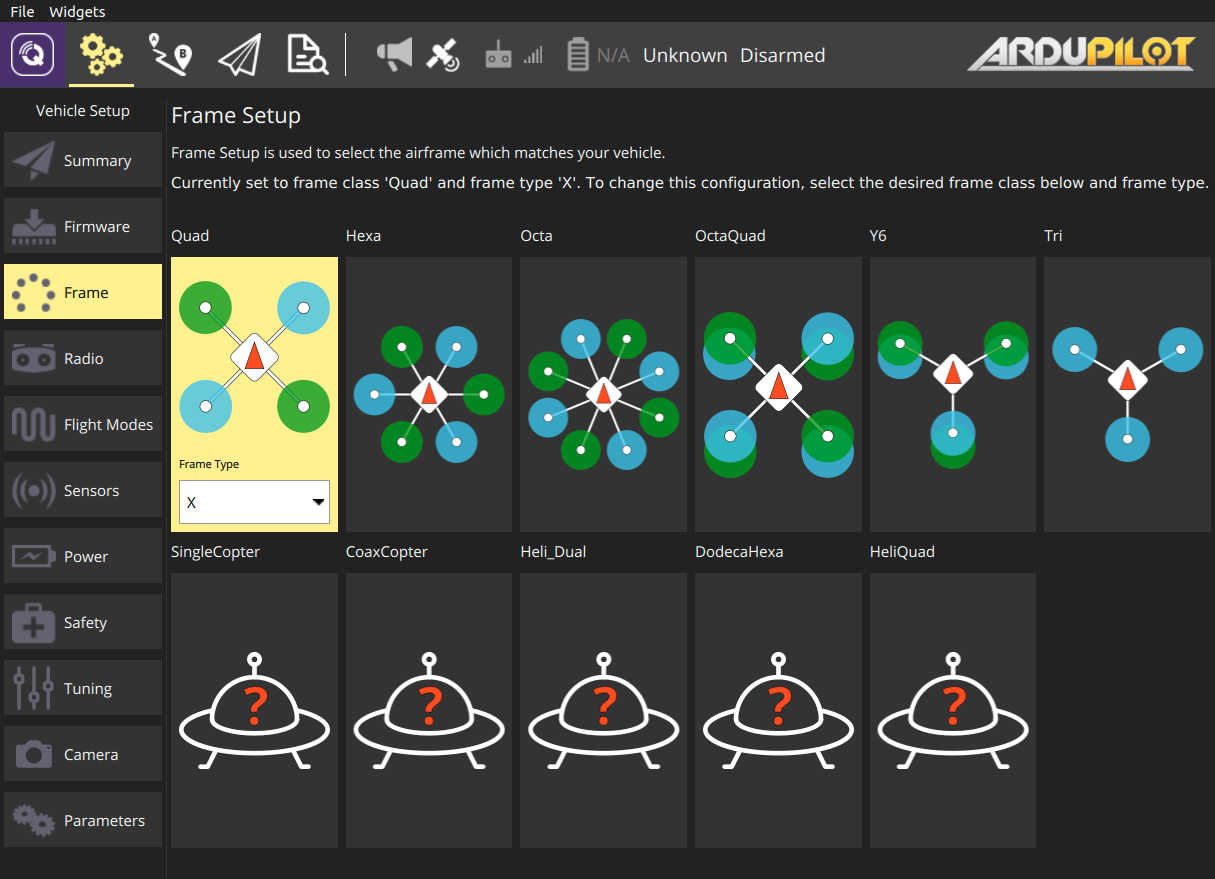
- PID 调节支持
- 手柄
- 计划
- 使用向导创建模板的计划,如完成完整计划的进度。
- 调查:将常用设置保存为预设
- 多边形编辑
- 新的编辑工具 ui
- 支持从地图位置追踪多边形
- ArduPilot
- 使用最新固件和mavlink v2支持GeoFence和集成点
- 模式预设
- 允许您保存图案项 (Survey, Corridor Scan, ...) 的设置 进入指定的预设。 在您创建新模式时,您可以连续多次使用这个预设。
- 飞行
- 单击以支持 ROI
- 添加支持连接到 ADSB SBS 服务器。 增添了对来自 USB 软件定义无线电(SDR)加密狗的ADSB数据的支持(例如 “dump1090 --net”)。
- 能够在指南针中开启首向起飞点、对地航迹(COG)和下一个航点标题指示器。
- 视频
- 添加对 h.265 视频流的支持
- 自动添加一个带有飞行数据的视频重叠作为本地录制视频的字幕
- 飞行前的具体载具类型核对表。 从设置中打开
- 分析
- 支持图表功能的新型MAVLink检查器。 支持所有构建,包括安卓和iOS。
- 基本配置
- 已发布的 Windows 构建现在是64 位
- 日志重播:指定重放速度的能力
- ArduPilot
- 在刷新和自动连接方面,改进对chibios firmwares和ArduPilot bootloader的支持。