QGroundControl Guide (Daily Builds)
![]()
![]()
QGroundControl 向PX4 或 ArduPilot 驱动的载具平台提供了全方位的飞行控制接口和载具设置接口。 它为初学者提供了方便直接的使用方法,同时仍然为有经验的用户提供高端功能支持。 它为初学者提供了方便直接的使用方法,同时仍然为有经验的用户提供高端功能支持。
主要特性:
- ArduPilot 和 PX4 Pro 所驱动载具的全套安装/配置。
- 支持运行PX4和ArduPilot的载具(或使用MAVLink协议通信的任何其他自动驾驶仪)。
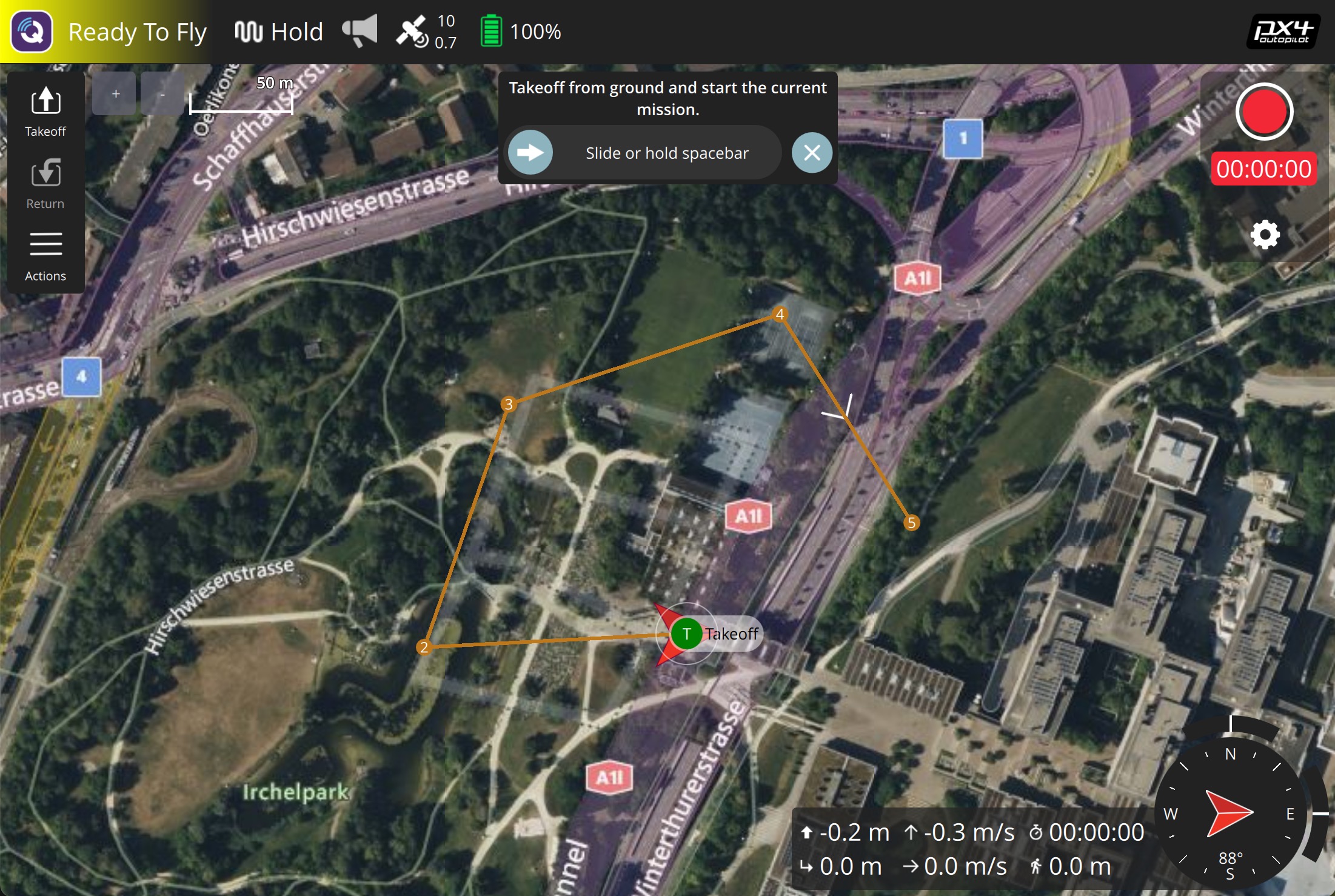
- 自主飞行的任务规划。
- 飞行地图上可显示载具的位置、飞行轨迹、航点和仪表盘等。
- 3D 查看器,用于可视化环境的 3D 地图(.osm 文件)、飞行器的 3D 模型(目前仅支持多旋翼飞行器)以及任务的 3D 轨迹(包括航路点)。
- 带有仪器显示叠加层的视频流媒体。
- 支持管理多个载具。
- QGC 可运行于Windows, OS X, Linux平台, iOS 和 Android 设备。
INFO
本指南将持续更新。 所提供的信息应该是准确的,但您可能会发现存在信息缺失或页面内容不完整的情况。
TIP
关于 QGroundControl 开发、构建、贡献和翻译的信息可在开发者指南部分找到。