QGroundControl Guide (Daily Builds)
![]()
![]()
_QGroundControl_을 이용하여 PX4나 ArduPilot 구동 차량을 설정하고 운행할 수 있습니다. 초보자를 위한 쉽고 간편한 기능 뿐만 아니라 숙련자를 위한 고급 기능들도 제공합니다.
주요 기능:
- ArduPilot과 PX4 Pro 구동 차량의 설정
- PX4와 ArduPilot(또는 기타 MAVLink 통신 자동조종장치)을 실행하는 기체 비행 방법
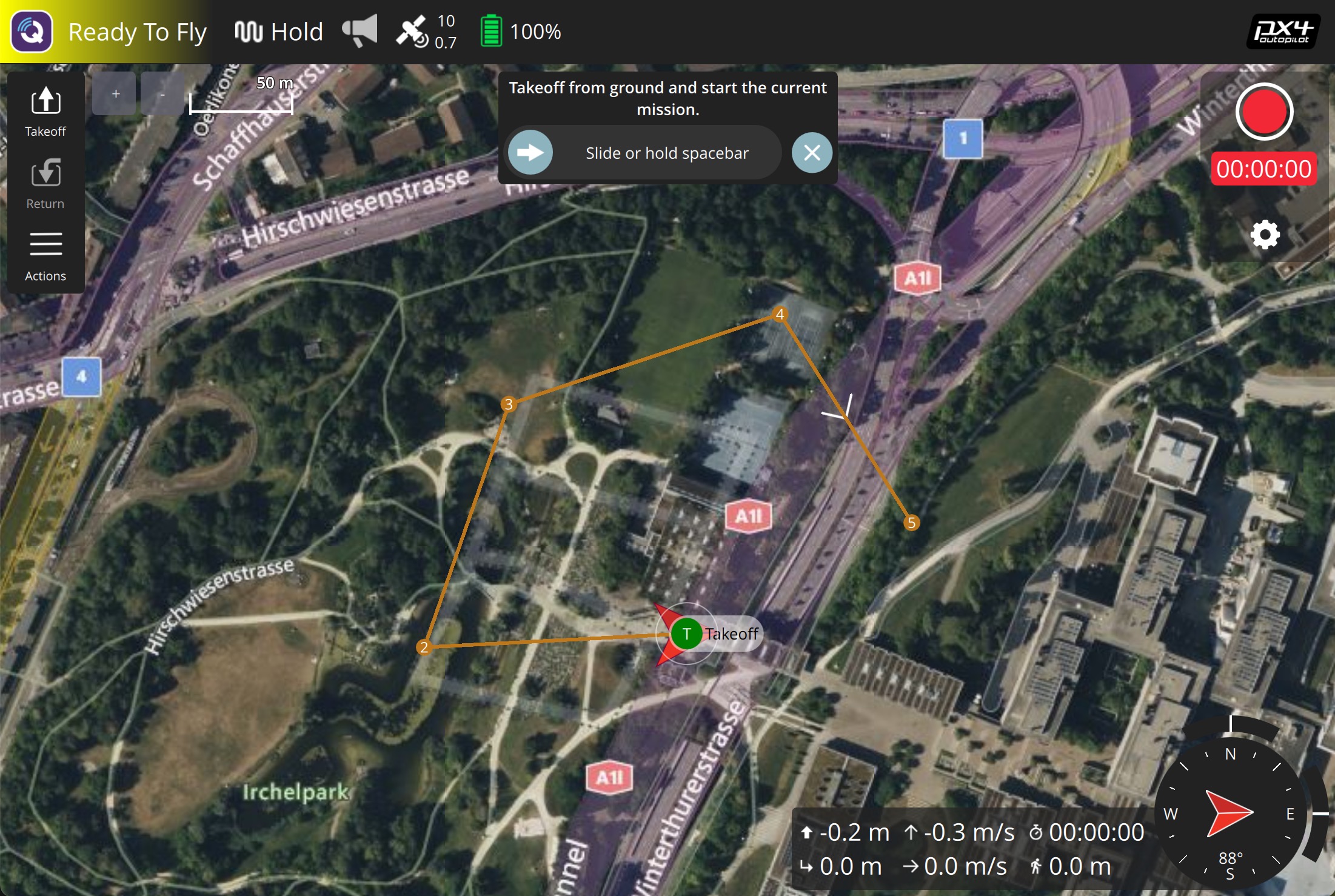
- 자율 비행을 위한 미션 계획
- 기체 위치, 비행 트랙, 웨이포인트 및 기체 계기를 표출하는 지도 디스플레이
- 3D viewer visualizing the 3D map of the environment (.osm file), the 3D model of the vehicle (only multi-rotors for the moment), and the mission 3D trajectory (including the waypoints).
- 기기 디스플레이 오버레이를 이용한 비디오 스트리밍
- Support for managing multiple vehicles.
- QGroundControl은 Windows, OS X, Linux 플랫폼, iOS 및 Android 장치에서 실행됩니다.
INFO
이 설명서는 작업 중인 버전입니다. 정확한 정보를 제공하기 위하여 노력하였습니다. 그럼에도 불구하고, 누락되거나 잘못된 부분이 있을 수 있습니다.
TIP
Information about QGroundControl development, architecture, contributing, and translating can be found in the Developer Guide section.