계획 뷰 - 랠리 포인트
랠리 포인트는 대체 착륙 또는 배회 장소입니다. 일반적으로 리턴/RTL 모드에서 홈 위치보다 더 안전하거나 더 편리한(예: 더 가까운) 목적지를 지정합니다.
INFO
랠리 포인트는 Rover 3.6 및 Copter 3.7(또는 그 이상)의 ArduPilot에서만 지원됩니다. PX4 지원은 PX4 v1.10에 계획되어 있습니다. 또한 일일 빌드 또는 Stable 3.6 버전을 사용하여야 합니다(한 번 사용 가능). 연결된 차량에서 지원하지 않는 경우 QGroundControl은 랠리 포인트 옵션을 표시하지 않습니다.

랠리 포인트 사용법
랠리 포인트를 생성하려면:
- 계획 뷰로 이동합니다.
- 임무 명령 목록 위의 랠리 라디오 버튼을 선택합니다.
- 랠리 포인트를 지도에서 원하는 곳을 클릭합니다.
- 각각에 대해 R 마커가 추가됩니다.
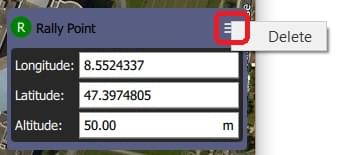
- 현재 활성화된 마커는 다른 색상(녹색)을 가지며 집합 포인트 패널을 사용하여 편집할 수 있습니다.
- 지도에서 랠리 포인트를 선택하여 활성화합니다.
- 지도에서 드래그하거나 패널에서 위치를 편집하여 활성 랠리 포인트를 이동합니다.
- 집회 지점 패널에서 메뉴 옵션을 선택하여 활성 집결 지점을 삭제합니다.
랠리 포인트 업로드
랠리 포인트를 계획 도구의 파일을 사용하여 미션과 동일한 방식으로 업로드합니다.
기타 도구
나머지 도구는 임무를 편집시와 동일한 기능을 제공합니다.