튜닝 (PX4)
한 번 튜닝으로 충분하며, 제조업체에서 튜닝후 기체를 수정한 기체가 아니면 튜닝을 하는 것이 바람직합니다.
자동 튜닝은 일반적으로 프레임 유형 및 이를 지원하는 콘트롤러(멀티콥터, 고정익 및 하이브리드 VTOL 고정익)에 적용하여야 합니다. 튜닝 UI는 모든 콘트롤러의 수동 튜닝도 지원합니다.
INFO
기체 설정 중에 귀하의 기체와 가장 근접하게 일치하는 프레임을 미리 선택하여야 합니다. 이것은 일반적으로 비행하기에 충분히 잘 조정되며 자동 튜닝을 실행하기에 충분히 잘 조정될 수 있습니다.
자동 튜닝
자동 튜닝은 안정적이고 반응성이 뛰어난 비행을 위한 가장 중요한 컨트롤러인 PX4의 속도 및 자세의 튜닝을 자동화합니다(다른 튜닝은 "선택 사항"에 가깝습니다).
INFO
이 가이드는 자동 튜닝의 기본 사용법을 보여줍니다. 추가 정보 및 설정은 PX4 자동 튜닝 가이드(PX4 사용자 가이드)을 참고하십시오.
사전 자동 튜닝 테스트
비행 중에 자동 튜닝이 수행됩니다. 기체 자동 튜닝을 실행하기 전에 비행할 수 있고 적절하게 안정화되어야 합니다. 이 테스트는 기체의 위치 제어 모드에서 안전하게 비행할 수 있는 지 확인합니다.
기체 자동 튜닝을 하여도 안정적인 지 확인하는 방법:
- 비행 구역이 깨끗하고 충분한 공간이 있는 지 확인하기 위하여 일반적인 비행 전 안전 검사를 수행합니다.
- 이륙 및 시험 준비
- 멀티콥터: 고도 모드 또는 안정화 모드에서 이륙하여 지상 1m에서 호버링합니다.
- 고정익 모드: 위치 모드 또는 고도 모드에서 순항 속도로 이륙하고 비행합니다.
- RC 송신기 롤 스틱을 사용하여 기체를 몇 도만 기울여 다음 기동을 수행하십시오. 좌회전 오른쪽 롤 중심 (전체 기동은 약 3초가 소요됩니다). 차량은 2번의 진동 내에서 안정되어야 합니다.
- 각 시도에서 더 큰 진폭으로 기울이면서 기동을 반복합니다. 기체가 ~20도에서 2번의 진동 내에서 안정화될 수 있으면 다음 단계로 이동합니다.
- 피치 축에서 동일한 동작을 반복합니다. 위의 A에서 작은 각도로 시작하여 기체의 틸트를 증가시키기 전에 2개의 진동 내에서 스스로 움직일 수 있는 지 확인하십시오.
드론이 2번의 진동 내에서 스스로 안정화될 수 있으면 자동 튜닝 절차의 준비가 완료된 것입니다.
그렇지 않으면, PX4 사용 설명서 > 자동 튜닝 > 문제 해결을 참고하십시오.
자동 튜닝 절차
자동 튜닝은 충분한 공간이 있는 안전한 지역에서 진행하여야 합니다. 약 40초(19~68초)가 걸립니다. 최상의 결과를 얻으려면 날씨가 좋고 바람이 적을 때 테스트 하는 것이 좋습니다.
INFO
RC 컨트롤러로 자동 튜닝 프로세스를 중단할 준비를 하십시오.
테스트 단계는 다음과 같습니다:
위의 사전 튜닝 테스트를 수행합니다.
RC를 사용하여 이륙하고 테스트 준비:
- 멀티콥터: 고도 모드에서 조종기를 사용하여 이륙합니다. 안전한 거리와 지상에서 몇 미터(4~20m)에서 기체를 호버링하십시오.
- 고정익 모드의 VTOL: 순항 속도로 비행하면 홀드 모드를 활성화합니다. 이렇게 하면 비행기가 일정한 고도와 속도로 원을 그리며 비행합니다.
QGroundControl에서 메뉴(기체 PID 튜닝)를 클릭합니다.
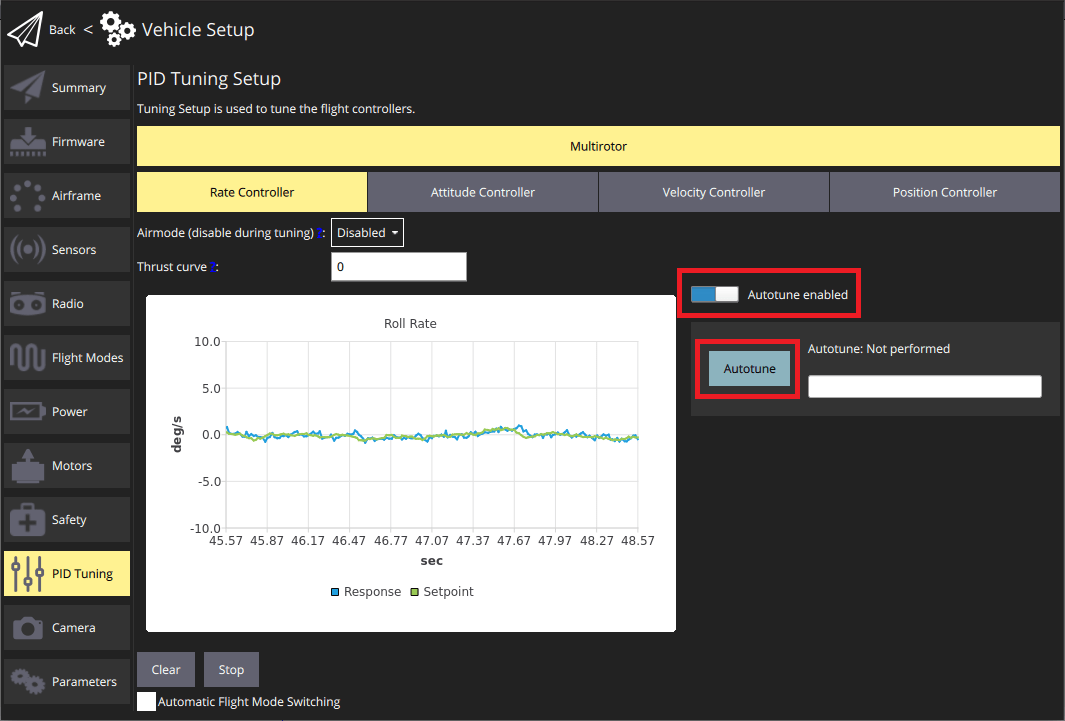
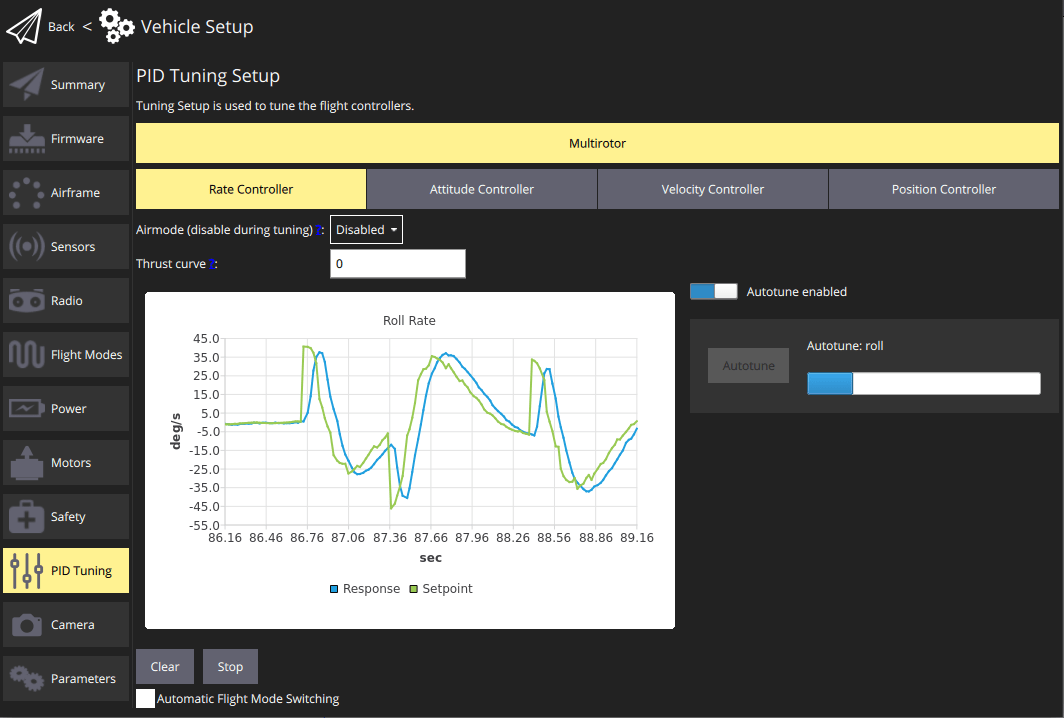
Rate Controller 또는 Attitude Controller 탭을 선택합니다. 자동 튜닝 활성화 버튼이 활성화되어 있는 지 확인합니다(이렇게 하면 자동 튜닝 버튼이 표시되고 수동 튜닝 선택기가 제거됨).
조이스틱의 움직임을 멈추고 자동 조정 버튼을 클릭합니다. 경고 팝업을 읽고 확인을 클릭하여 튜닝을 시작합니다.
드론은 먼저 빠른 롤 동작을 수행한 후 피치 및 요 동작을 수행합니다. 진행률은 자동 조정 버튼 옆의 진행률 표시줄에 표시됩니다.
튜닝을 적용하려면:
- 고정익: 조정이 즉시 자동으로 적용되고 비행 중에 테스트됩니다(기본값). 그런 다음, PX4는 4초 테스트를 실행하고 문제가 감지되면 새 튜닝 작업을 이전 상태로 되돌립니다.
- 멀티콥터: 새로운 조정 매개변수를 적용하기 위하여 수동으로 착륙하고 시동을 해제합니다. 조심스럽게 이륙하고 기체의 안정성을 수동으로 테스트하십시오.
강한 진동이 발생하면 즉시 착지하고 PX4 사용자 가이드 > 자동 튜닝 > 문제 해결의 지침을 따르십시오.
프로세스의 비디오는 다음과 같습니다:
수동 테스트
수동 튜닝은 비행 중에 이루어지므로 기체는 미리 비행에 적합하게 튜닝되어 있어야 합니다(일반적으로 적절한 기본 기체를 선택한 경우).
아래 지침은 수동 튜닝 UI를 사용하는 방법을 설명합니다. PID 값을 변경할 때 사용할 스텝 크기의 종류에 대한 자세한 힌트를 제공하는 PX4 수동 PID 튜닝 가이드와 함께 읽고/사용하도록 설계되었습니다.
개요:
RC를 사용하여 이륙하고 테스트 준비:
- 멀티콥터: 고도 모드에서 조종기를 사용하여 이륙합니다. 안전한 거리와 지상에서 몇 미터(4~20m)에서 기체를 호버링하십시오.
- 고정익: 순항 속도로 비행하면 유지 모드를 활성화합니다. 이렇게 하면 비행기가 일정한 고도와 속도로 원을 그리며 비행합니다.
QGroundControl에서 메뉴(차량 설정 PID 조정)를 클릭합니다.
Rate Controller 탭을 선택하십시오. 자동 튜닝 사용 버튼이 꺼져 있는 지 확인합니다.
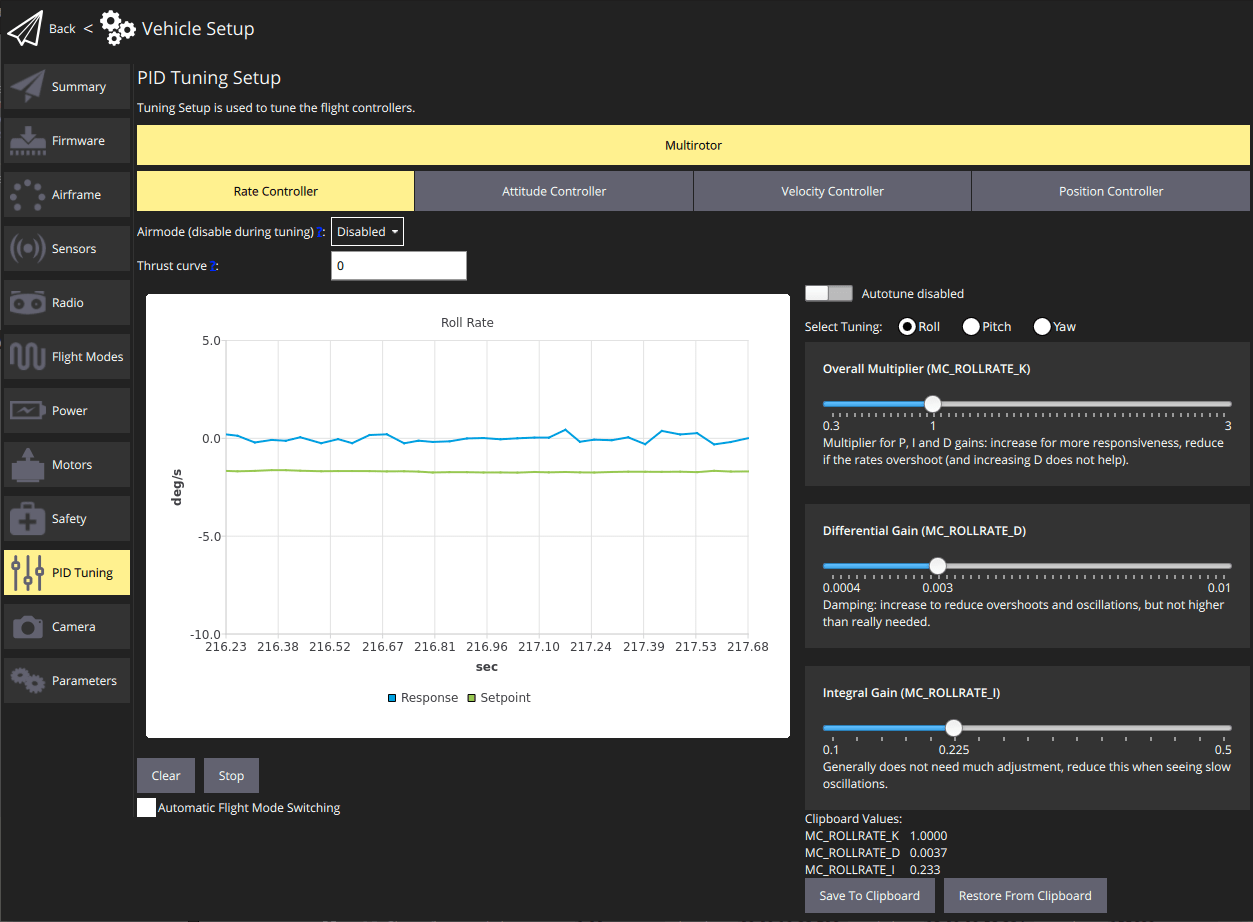
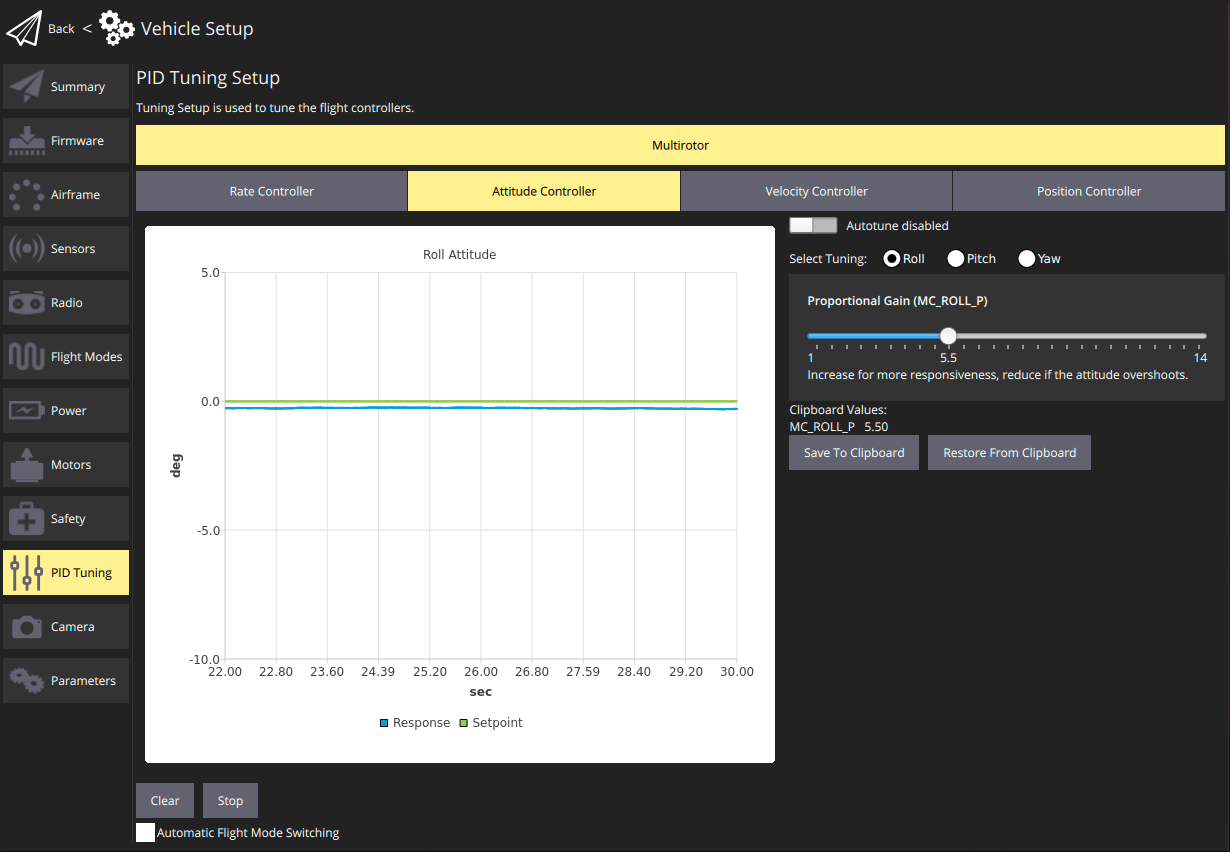
조정할 조정 축을 선택합니다: 롤, 피치 또는 요(각 축은 개별적으로 조정됨).
차트의 추적을 관찰하면서 비행합니다.
- 슬라이더를 사용하여 그래프에 표시되는 추적을 개선하려면 조정 값(매개변수)을 조정합니다.
- 값은 자동으로 저장되지만 클립보드에 저장 및 클립보드에서 복원 버튼을 사용하여 마지막으로 성공한 설정을 저장할 수 있습니다.
- 제공된 버튼을 사용하여 차트를 지우기/중지할 수도 있습니다.
다른 축을 튜닝합니다.
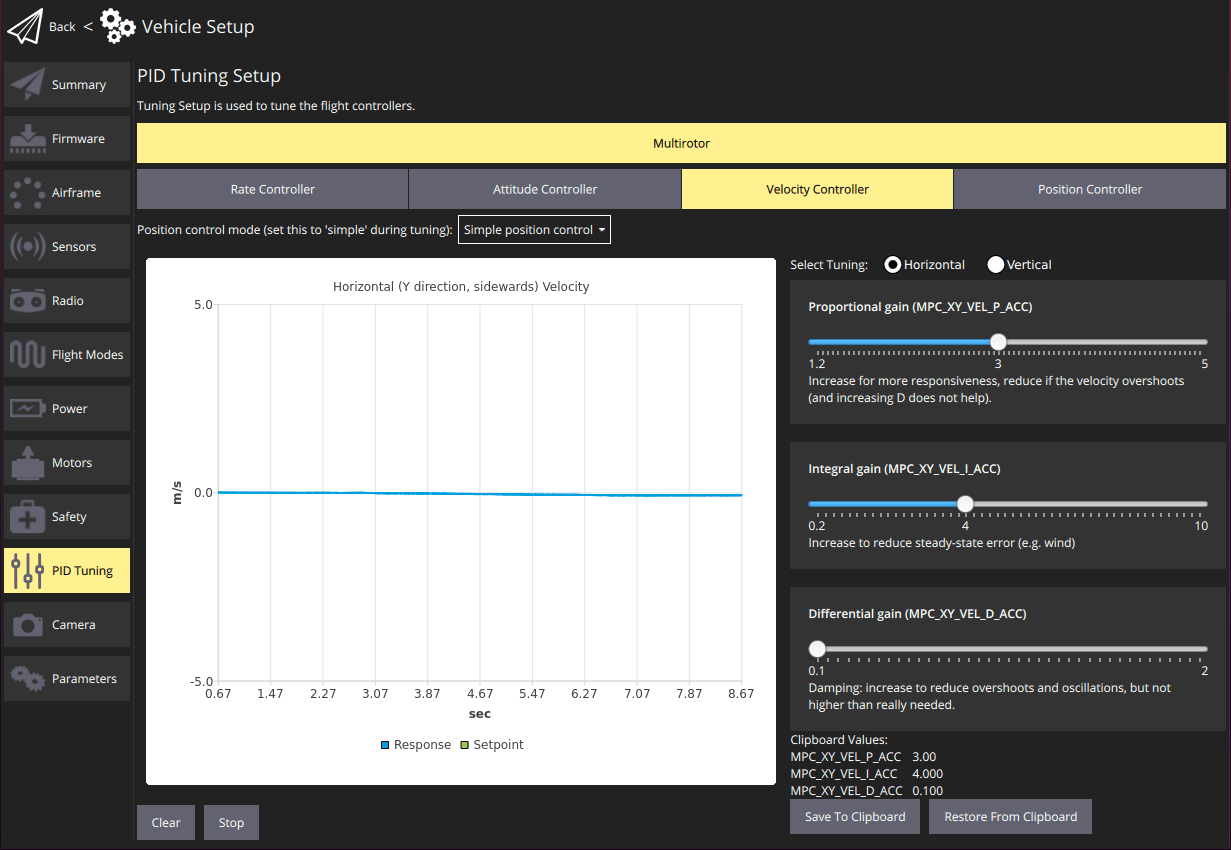
다른 컨트롤러로 전환하고 프로세스를 반복합니다. 튜닝 페이지의 캡쳐 화면은 아래와 같습니다.