QGroundControl v4.0 릴리스 노트(추가)
이 항목에는 QGroundControl 4.0에 대한 추가 참고 사항이 포함되어 있습니다. 이것들은 앞으로 몇 달 안에 주요 문서에 통합되어야 합니다(이 문서는 삭제됨).
- 패턴 사전 설정 - 패턴 항목(측량, 복도 스캔, ...)에 대한 설정을 명명된 사전 설정에 저장할 수 있습니다. 그런 다음 새 패턴을 만들 때 이 사전 설정을 계속 사용할 수 있습니다.
- ArduPilot:
- 콥터 - PID 튜닝 지원
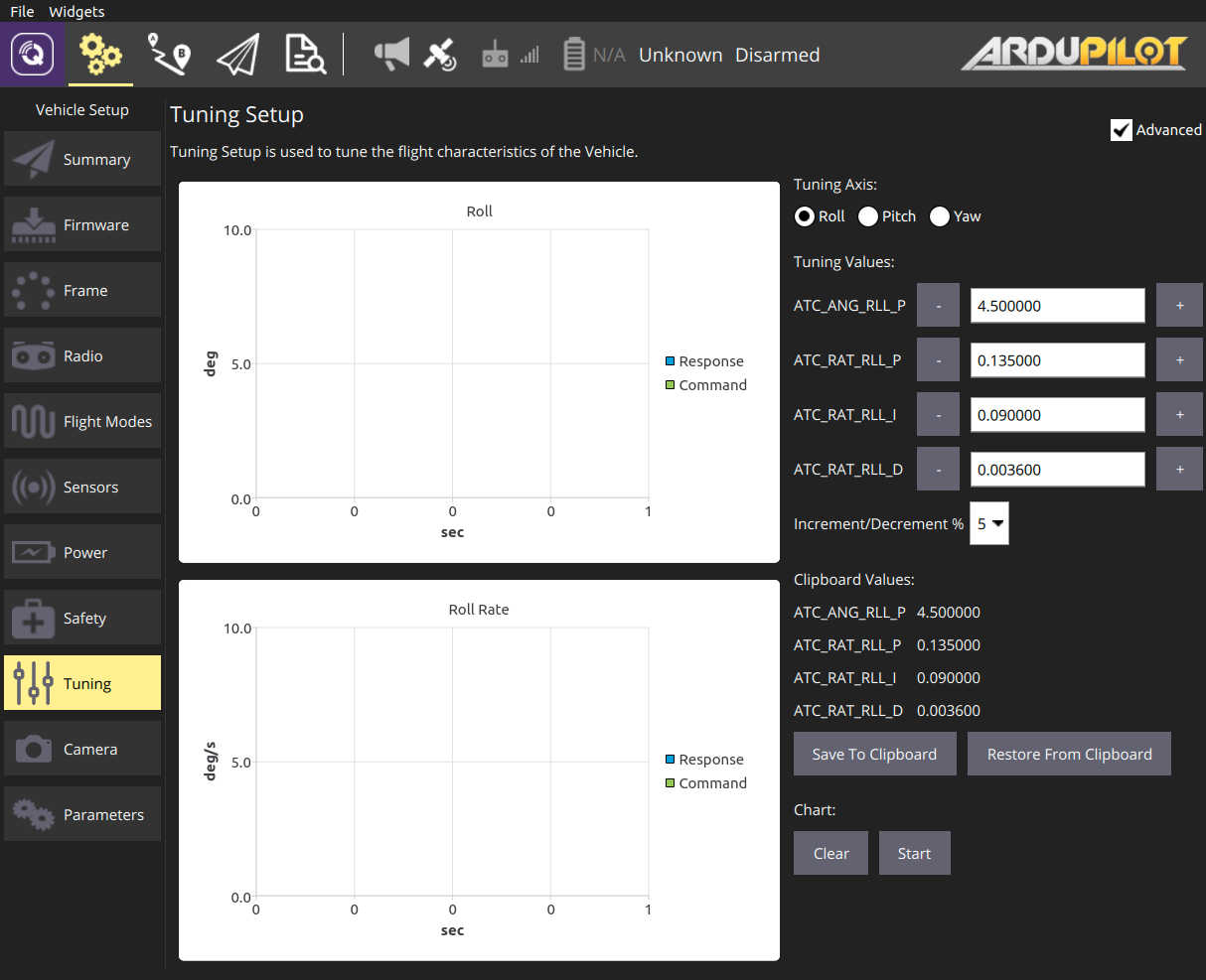
- 콥터 - 추가 기본 튜닝 옵션

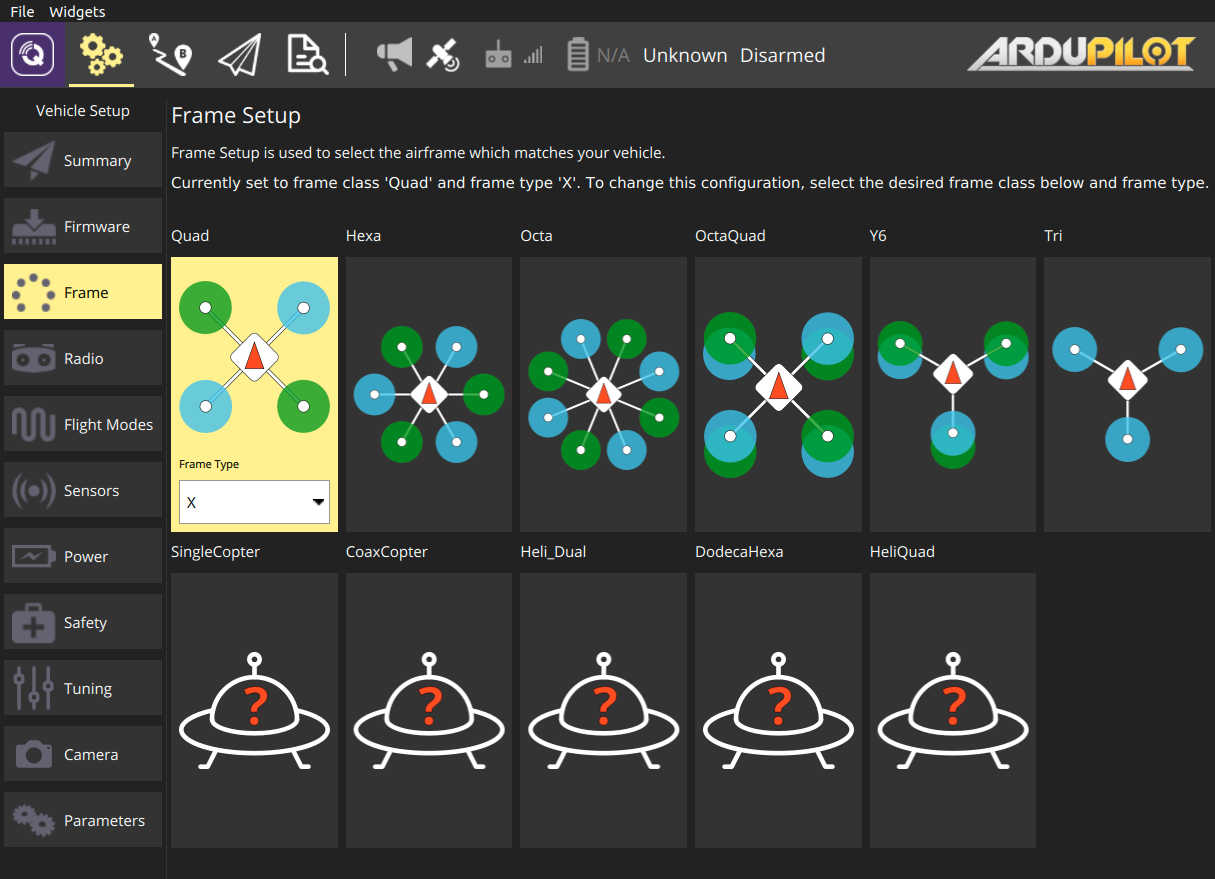
- 콥터/로버 - 프레임 설정 UI
- ChibiOS 펌웨어 플래시 지원 개선
- ChibiOS 부트로더 보드 연결 지원 개선
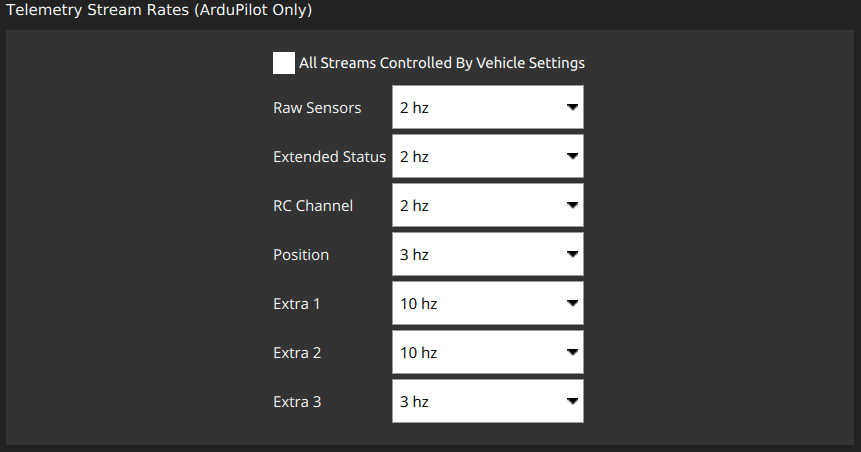
- 구성 가능한 mavlink 스트림 속도를 지원합니다. 설정/Mavlink 페이지에서 사용할 수 있습니다.
- 콥터 - PID 튜닝 지원