ArduPilot 비행 모드 설정
비행 모드 섹션에서는 RC 송신기의 특정 스위치/스위치 위치에 의해 트리거되는 비행 모드 및 기타 작업을 설정할 수 있습니다.
이 섹션에 액세스하려면, 상단 툴바에서 기어 아이콘(차량 설정)을 선택한 다음 사이드바에서 비행 모드를 선택하세요.
비행 모드 설정
ArduPilot에서 최대 6개의 다른 비행 모드를 송신기의 단일 채널에 할당할 수 있습니다(채널은 평면에서 선택 가능하지만 멀티콥터에서는 채널 5로 고정됨). 또한 ArduCopter를 사용하면 채널 7-12에 대한 추가 채널 옵션을 설정할 수 있습니다. 이를 통하여 스위치에 기능을 설정합니다(예: 카메라를 켜거나 실행으로 돌아가기).
비행 모드를 설정 방법:
RC 송신기를 켭니다.
상단 툴바에서 기어 아이콘(차량 설정)을 선택한 다음 사이드바에서 비행 모드를 선택합니다.
INFO
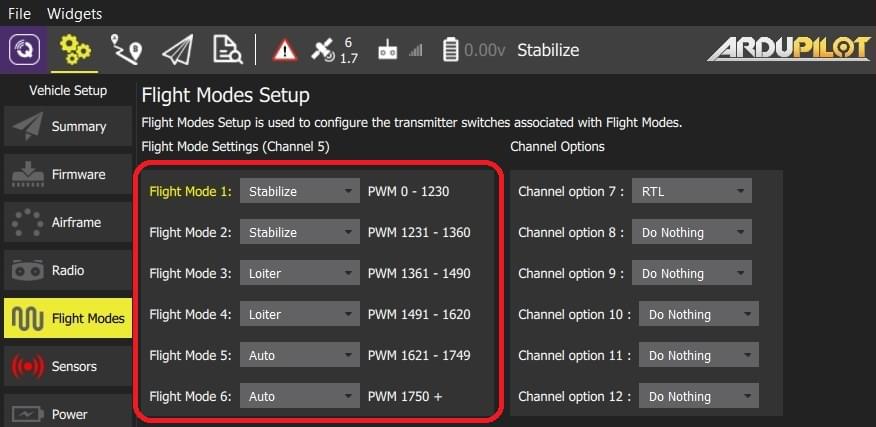
위 이미지는 ArduCopter의 비행 모드 설정 스크린샷입니다.
드롭다운에서 최대 6개의 비행 모드를 선택합니다.
ArduCopter만 해당: 채널 7-12에 대해 추가 채널 옵션을 선택합니다.
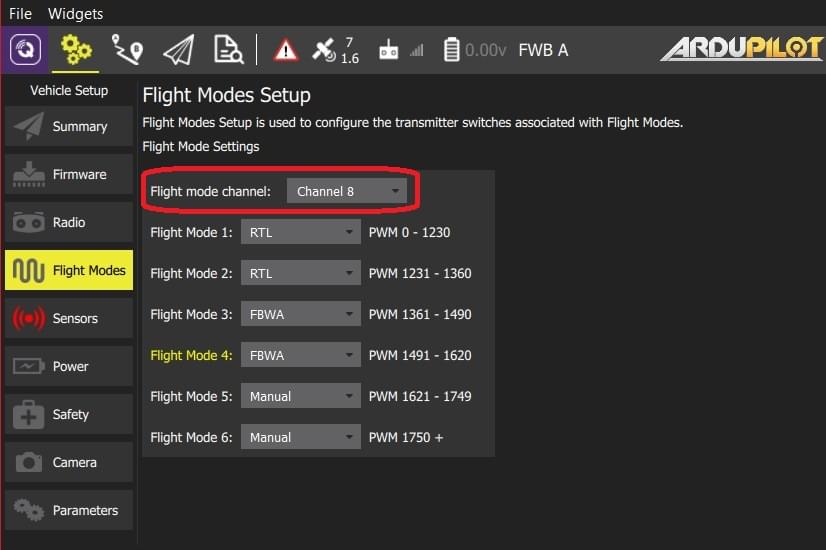
ArduPlane만 해당: 드롭다운에서 모드 채널을 선택합니다.
송신기의 각 모드 스위치를 차례로 선택하여 모드가 올바른 송신기 스위치에 매핑되는지 테스트하고, 선택한 비행 모드 활성화 여부를 확인합니다(활성 모드의 경우 QGroundControl에서 텍스트가 노란색으로 변경됩니다).
모든 값은 변경시에 자동으로 저장됩니다.
INFO
위의 ArduCopter 스크린샷은 채널 7 스위치에 RTL의 추가 옵션이 있는 3위치 비행 모드 스위치의 일반적인 설정을 보여줍니다. 또한 2개의 스위치와 송신기의 믹싱을 사용하여 6가지 비행 모드를 설정할 수 있습니다. 방법에 대한 자습서를 보려면 이 페이지의 중앙 섹션으로 스크롤하십시오.
참고:
- ArduCopter 비행 모드
- ArduPlane 비행 모드
- ArduCopter > 보조 기능 스위치 - 채널 설정에 대한 추가 정보