펌웨어 로딩
QGroundControl 데스크탑 버전을 이용하여 Pixhawk 비행 컨트롤러에 PX4 Pro 또는 ArduPilot 펌웨어를 설치할 수 있습니다. QGroundControl은 선택한 자동조종장치의 최신 안정적인 버전을 기본적으로 설치하며, 베타 버전, 일일 빌드 버전 또는 사용자 지정 버전의 펌웨어를 설치할 수 있습니다.
QGroundControl은 SiK 라디오 및 PX4 Flow 기기용 펌웨어도 설치할 수 있습니다.
Caution 펌웨어 업로드는 현재 QGroundControl의 태블릿이나 스마트폰 버전에서는 사용할 수 없습니다.
펌웨어 업데이트를 위한 장치 연결
Caution 펌웨어를 설치 전에 기체에 모든 USB (직접 또는 원격 측정 라디오) 연결은 해제하여야 합니다. 기체에 배터리를 연결하지 않아야 합니다.
상단 툴바에서 기어 아이콘 (기체 설정) 을 선택한 다음 사이드 바에서 펌웨어를 선택하십시오.
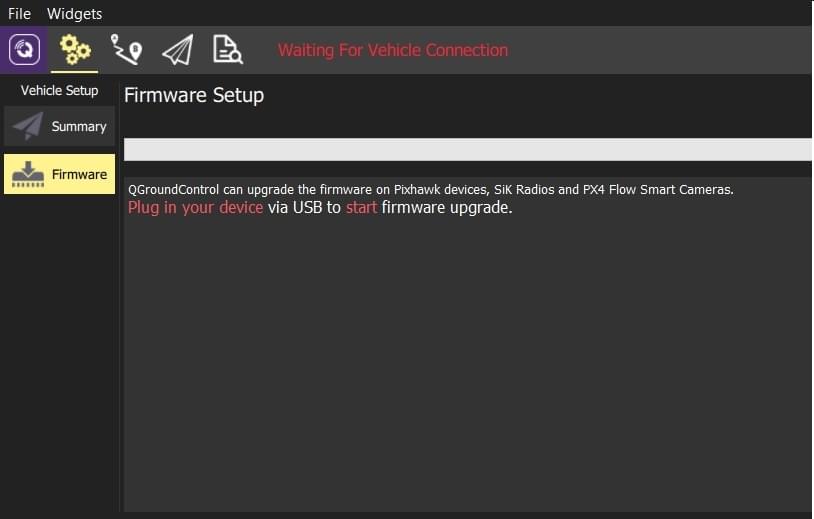
USB를 통해 장치(Pixhawk, SiK Radio, PX4 Flow)를 컴퓨터에 직접 연결합니다.
INFO
컴퓨터에서 전원이 공급되는 USB 포트에 직접 연결합니다(USB 허브를 사용하여 연결하지 마십시오).
업로드할 펌웨어 선택
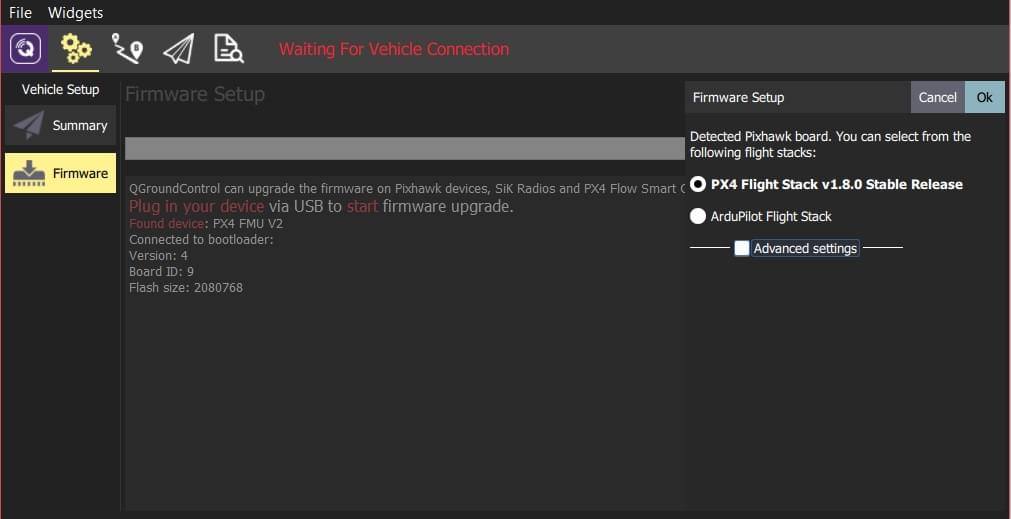
장치가 연결되면 업로드 펌웨어를 선택할 수 있습니다(QGroundControl은 연결된 하드웨어를 기반으로 최적의 옵션을 자동으로 제공합니다).
Pixhawk 호환 보드에서는 PX4 Flight Stack vX.X.X Stable Release 또는 ArduPilot Flight Stack 라디오 버튼을 선택하여 현재 안정적인 릴리즈 버전를 다운로드하십시오.
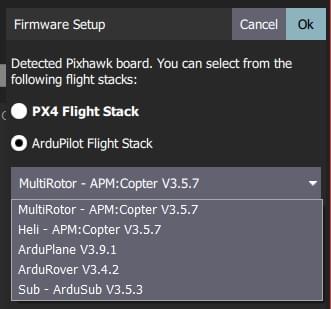
ArduPilot을 선택하면 특정 펌웨어와 차량 유형도 선택하여야 합니다(아래의 그림 참조).
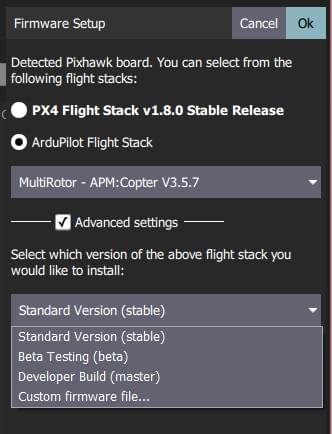
특정 개발자 릴리즈를 선택하거나 로컬 파일 시스템에서 펌웨어를 설치하려면 고급 설정을 사용하십시오.
펌웨어 업데이트
업데이트를 시작하려면 OK 버튼을 클릭합니다.
펌웨어가 업그레이드(펌웨어 다운로드, 이전 펌웨어 삭제 등)를 진행합니다. 각 단계 화면을 표출하고, 전체 진행률이 표시줄에 출력됩니다.
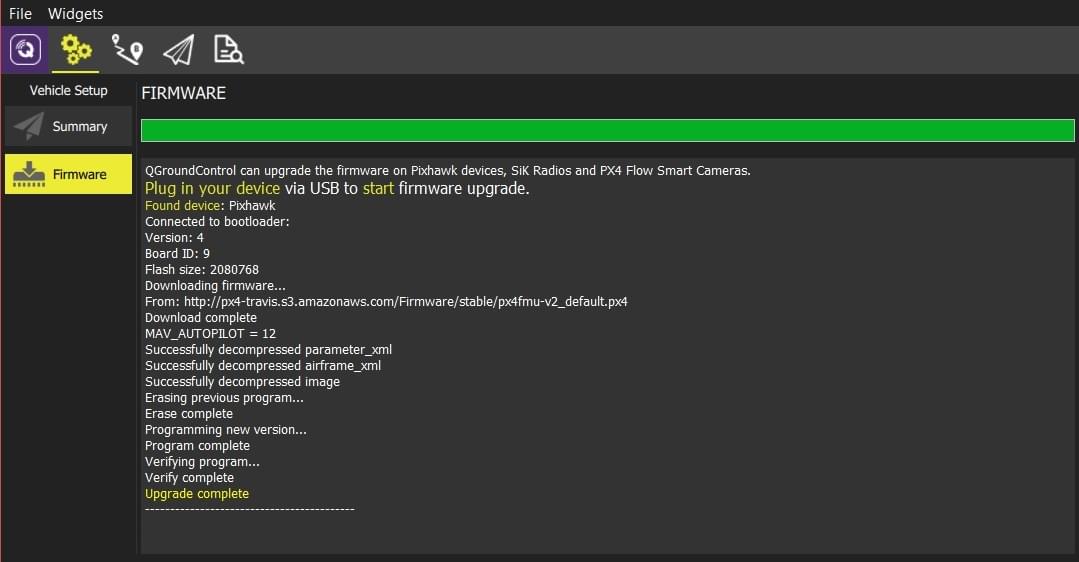
펌웨어의 업로드가 완료되면, 장치가 재부팅되고 다시 연결됩니다. 다음으로 기체 프레임을 지정하여야 합니다(그리고 센서, 라디오 등).