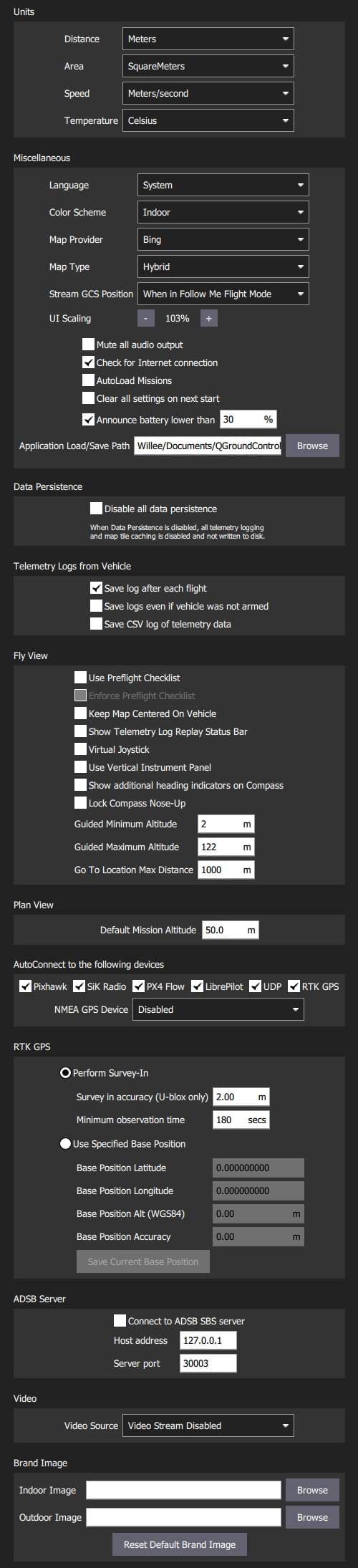
일반 설정(설정 화면)
일반 설정(설정 화면> 일반 설정)은 애플리케이션의 주요 항목들을 설정합니다. 디스플레이 장치, 자동 연결 장치, 비디오 디스플레이 및 저장 장치, RTK GPS, 브랜드 이미지 및 기타 항목들을 설정합니다.
INFO
기체가 연결되지 않은 상태에서도 설정할 수 있습니다. 차량 재시동이 필요한 설정은 UI에 표시됩니다.
단위
이 섹션에서는 응용 프로그램의 표시 단위를 정의합니다.
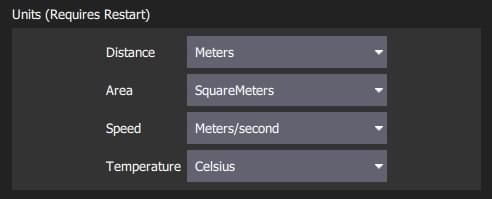
설정은 다음과 같습니다:
- 거리: 미터 | 피트
- 면적: 평방미터 | 스퀘어피트 | 평방킬로미터 | 헥타르 | 에이커 | 스퀘어마일스
- 속도: 미터/초 | 피트/초 | 마일/시간 | 킬로미터/시간 | 매듭
- 온도: 섭씨 | 화씨
기타
이 섹션에서는 (완벽하지 않음)과 관련된 여러 가지 항목들을 설정합니다: 글꼴 크기, 색 구성표, 지도 제공자, 지도 유형, 원격 측정 로깅, 오디오 출력, 배터리 부족 알림 수준, 기본 임무 고도, 가상 조이스틱, 임무 자동 로드, 기본 애플리케이션 파일 로드/저장 경로 등
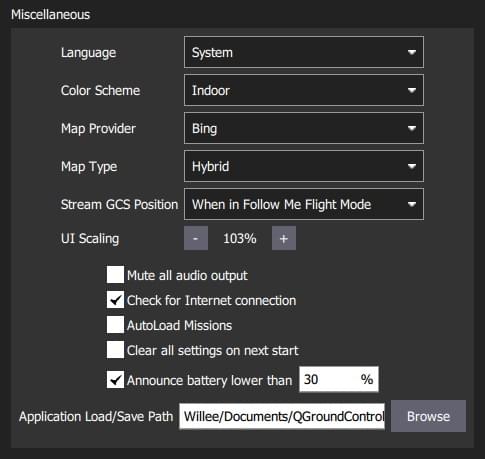
설정 항목들은 다음과 같습니다:
언어: 시스템(시스템 언어) | 불가리아어, 중국어, ...

색 구성표: 실내(어두운) | 야외(조명)
지도 제공자: Google | 맵박스 | 빙 | 에어맵 | 브이월드 | 에니로 | 스탯카트
지도 유형: 도로 | 하이브리드 | 위성
스트림 GCS 위치: 안 함 | 항상 | 팔로우 미 플라이트 모드 시
UI 크기 조정: UI 크기 비율(글꼴, 아이콘, 버튼 크기, 레이아웃 등에 영향)
모든 오디오 출력 음소거: 모든 오디오 출력을 끕니다.
인터넷 연결 확인: 지도 데이타의 다운로드 실패할 수 있는 환경에서 지도를 사용 가능하도록하려면 선택을 취소합니다(지도 타일 엔진이 인터넷 연결을 지속적으로 재확인하는 것을 중지함).
미션 자동 로딩: 활성화하면 연결 시 차량에 자동으로 미션을 업로드합니다.
- 계획 파일의 이름은 AutoLoad#.plan이어야 하며, 여기서
#은 차량 Id로 대체됩니다. - 계획 파일은 응용 프로그램 로드/저장 경로에 위치하여야 합니다.
- 계획 파일의 이름은 AutoLoad#.plan이어야 하며, 여기서
다음 시작 시 모든 설정 지우기: QGroundControl이 다시 시작될 때 모든 설정을 기본값(이 항목 포함)으로 재설정합니다.
배터리 부족 알림: QGroundControl이 배터리 부족 알리는 배터리 수준입니다.
애플리케이션 로드/저장 경로: 매개변수, 원격 측정 로그 및 임무 계획을 포함하여 애플리케이션 파일을 로드 및 저장하는 기본 위치입니다.
데이터 지속성
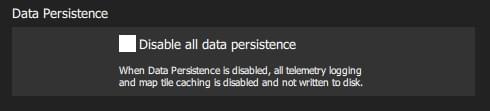
설정 항목들은 다음과 같습니다:
- 모든 데이터 지속성 사용 안함: 로그, 지도 타일 등 데이터가 저장되거나 캐시되지 않도록 확인합니다. 이 설정은 원격 분석 로그 섹션을 비활성화합니다.
기체의 텔레메트리 로그
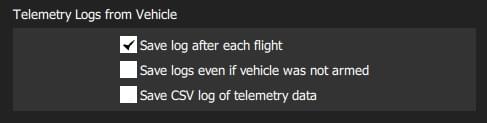
설정 항목들은 다음과 같습니다:
- 비행 후 로그 저장 : 원격 측정 로그(
.tlog)는 비행 후 응용 프로그램 로드/저장 경로(위)에 자동으로 저장됩니다. - 차량 비시동시 로그 저장: 차량이 QGroundControl에 연결시 기록을 저장합니다. 차량 연결이 끊어지면 기록을 중지합니다.
- CSV 로깅: 원격 측정 데이터의 하위 집합을 CSV 파일에 기록합니다.
비행 화면
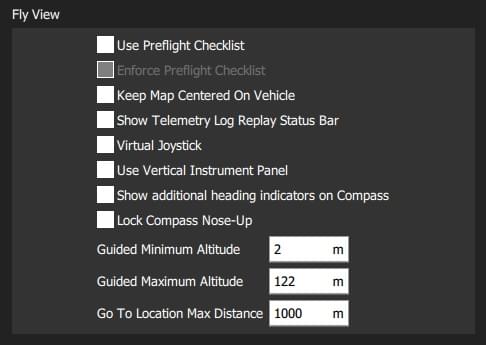
설정 항목들은 다음과 같습니다:
실행 전 체크리스트 사용: 빗행도구 모음에서 실행 전 체크리스트를 활성화합니다.
실행 전 체크리스트 적용: 체크리스트 완료는 무장을 위한 전제 조건입니다.
차량 중앙에 지도 유지: 지도가 현재 선택된 차량의 중앙에 위치하도록 합니다.
텔레메트리 로그 재생 상태 표시줄 표시: 비행 데이터 재생에 대한 상태 표시줄을 표시합니다.
가상 조이스틱: 가상 조이스틱 활성화(PX4만 해당)
수직 계기판 사용: 계기판을 수평이 아닌 수직으로 정렬합니다(기본값).
나침반에 추가 방향 표시기 표시: 나침반에 추가 표시기를 표시합니다.
파란색 화살표: 지면 위의 코스입니다.
백악관: 집으로 돌아가는 방향.
녹색 선: 다음 웨이포인트 방향.
Lock Compass Nose-Up: 나침반 장미를 회전하려면 선택합니다(기본값은 나침반 표시기 내부에서 기체을 회전입니다).
안내식 최소 고도: 안내식 작업 고도 슬라이더의 최소값입니다.
안내식 최대 고도: 안내식 작업 고도 슬라이더의 최소값입니다.
이동 위치 최대 거리: 이동 위치가 현재 차량 위치에서 설정될 수 있는 최대 거리(안내 모드에서).
계획 화면

설정 항목들은 다음과 같습니다:
- 기본 임무 고도: 임무 시작 패널 및 첫 번째 웨이포인트의 기본 고도입니다.
다음 장치에 자동으로 연결
이 섹션은 QGroundControl이 자동으로 연결할 기기 세트를 정의합니다.
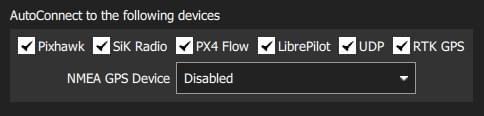
설정 항목들은 다음과 같습니다.
- Pixhawk: Pixhawk 시리즈 기기에 자동 연결
- SiK 라디오: SiK(텔레메트리) 라디오에 자동 연결
- PX4 Flow: PX4Flow 기기에 자동 연결
- LibrePilot: Libre Pilot 자동조종장치에 자동 연결
- UDP: UDP에 자동 연결
- RTK GPS: RTK GPS 기기에 자동 연결
- NMEA GPS 장치: 외부 GPS 장치에 자동 연결하여 지상국 위치를 획득합니다(아래 참조).
지상국 위치(NMEA GPS 장치)
QGroundControl은 자동으로 내부 GPS를 사용하여 자주색 Q 아이콘으로 지도에 자신의 위치를 표시합니다(GPS가 방향을 제공하는 경우 이는 아이콘으로도 표시됩니다. 또한 GPS를 팔로우 미 모드의 위치 소스로 사용할 수 있습니다. 현재 PX4 멀티콥터에서만 지원됩니다.
직렬 또는 UDP 포트를 통하여 외부 GPS 장치에 연결하도록 QGroundControl을 설정할 수 있습니다. GPS 장치는 일반적으로 ASCII NMEA 형식을 지원합니다.
도움말 지상국에 내부 GPS 지원 기능이 있는 경우에도 고품질 외부 GPS 시스템이 유용할 수 있습니다.
NMEA GPS 장치 드롭다운 선택기를 사용하여 GPS 장치 및 기타 옵션을 수동으로 선택합니다.
USB 연결:
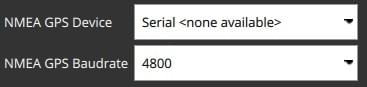
- NMEA GPS 장치: 직렬
- NMEA GPS Baudrate: 직렬 포트 전송 속도
TIP
직렬 GPS 문제를 해결하려면 RTK GPS 자동 연결을 비활성화하고 QGroundControl을 닫고 GPS를 다시 연결한 다음 QGroundControl을 실행합니다.
네트워크 연결:

- NMEA GPS 장치: UDP 포트.
- NMEA 스트림 UDP 포트: QGC가 NMEA 데이터를 수신할 UDP 포트(QGC는 포트를 서버로 바인딩)
RTK GPS
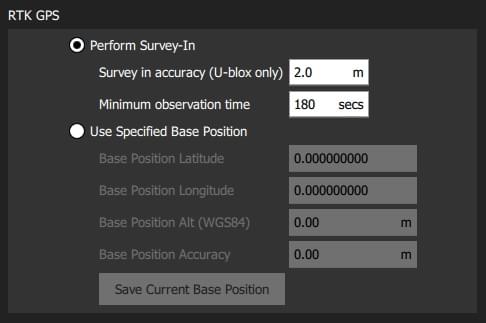
이 섹션에서는 RTK GPS "측량" 설정을 지정하고, 측량 작업의 결과를 저장 및 재사용하거나, 베이스 스테이션에 대해 알려진 다른 위치를 직접 입력할 수 있습니다.
INFO
설문조사 프로세스는 기지국 위치의 정확한 추정치를 얻기 위해 RTK GPS 시스템에 필요한 시작 절차입니다. 이 프로세스는 시간이 지남에 따라 측정을 수행하여 위치 정확도를 높입니다. 설문조사가 완료되려면 두 가지 설정 조건이 모두 충족되어야 합니다. 자세한 내용은 RTK GPS(PX4 문서) 및 GPS- 작동 방식(ArduPilot 문서)을 참고하십시오.
TIP
기본 위치를 저장하고 재사용하려면(서베이 인은 시간이 많이 소요됩니다!) 설문 조사를 한 번 수행하려면 지정된 기본 위치 사용을 선택하고 을 누르십시오. 현재 기준 위치를 저장하여 마지막 설문조사의 값을 복사합니다. 그러면, 값이 변경시까지 QGC 재부팅시에도 유지됩니다.
설정 항목들은 다음과 같습니다:
- 측량 수행
- 설문 조사 정확도(U-blox만 해당): RTK 조사 조사를 완료하기 위한 최소 위치 정확도입니다.
- 최소 관찰 기간: RTK 설문 조사에 소요되는 최소 시간입니다.
- 지정된 기준 위치 사용
- 기본 위치 위도: 고정 RTK 기지국의 위도입니다.
- 기본 위치 경도: 고정 RTK 기지국의 경도입니다.
- Base Position Alt(WGS94): 고정 RTK 기지국의 고도입니다.
- 기지 위치 정확도: 기지국 위치 정보의 정확도.
- 현재 베이스 위치 저장(버튼): 마지막 Survey-In 작업의 설정을 위의 지정된 베이스 위치 사용 필드에 복사하려면 누릅니다.
ADSB 서버

설정 항목들은 다음과 같습니다:
- ADSB SBS 서버에 연결: 시작 시 ADSB 서버에 연결합니다.
- 호스트 주소: ADSB 서버 호스트 주소
- 서버 포트: ADSB 서버 포트
QGroundControl는 원격 또는 로컬 서버(지정된 IP 주소/포트)에서 SBS 형식의 ADSB 메시지를 사용하고 탐지된 기체를 비행화면의 지도에 표시할 수 있습니다.
TIP
주변 기체에서 ADSB 정보를 얻는 한 가지 방법은 dump1090을 사용하여 연결된 RTL-SDR 동글에서 QGC로 데이터를 제공하는 것입니다. 과정은 다음과 같습니다: 1. RTL-SDR 동글(및 안테나)을 가져와 지상국 컴퓨터에 연결합니다(사용 중인 OS에 대해 호환되는 드라이버를 찾아야 할 수도 있음). 1. OS에 dump1090을 설치합니다(사전 빌드 또는 소스에서 빌드). 1. dump1090 --net을 실행하여 TCP localhost 포트 30003(127.0.0.1:30003)에서 감지된 차량에 대한 메시지 브로드캐스트를 시작합니다. 1. 위의 QGroundControl 설정에 서버(127.0.0.1)와 포트(30003) 주소를 입력합니다. 1. 지도에서 지역 차량을 보려면 QGroundControl을 다시 시작하세요.
비디오
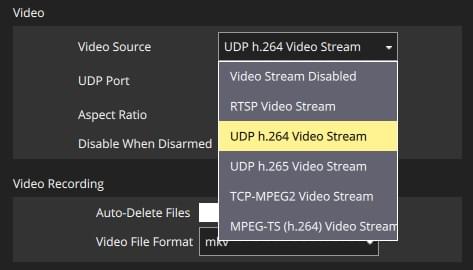
비디오 섹션은 비행 화면에 표시될 비디오의 소스 및 연결 설정을 정의합니다.
설정 항목들은 다음과 같습니다:
- 비디오 소스: 비디오 스트림 비활성화됨 | RTSP 비디오 스트림 | UDP h.264 비디오 스트림 | UDP h.265 비디오 스트림 | TCP-MPEG2 비디오 스트림 | MPEG-TS(h.264) 비디오 스트림 | 통합 카메라 > 참고 비디오 소스가 지정되지 않으면 다른 비디오 또는 비디오 녹화 설정이 표시되지 않습니다(위에서 UDP 소스가 선택되었을 때의 설정을 볼 수 있음).
- URL/포트: 연결 유형별 스트림 주소(포트 또는 URL일 수 있음).
- Aspect Ratio: 비디오 위젯에서 비디오 크기 조정을 위한 종횡비(크기 조정을 무시하려면 0.0으로 설정)
- Disabled When Disarmed: 기체 비시동시 비디오 전송을 비활성화합니다.
- 낮은 대기 시간 모드: 짧은 대기 시간 모드를 사용하면 동영상 스트림 대기 시간이 줄어들지만 프레임 손실과 끊김 현상이 발생할 수 있습니다(특히 네트워크 연결이 불량한 경우).
비디오 녹화
동영상 녹화 섹션은 파일 형식과 동영상 저장을 위해 할당된 최대 파일 저장 공간을 지정하는 데 사용됩니다. 비디오는 애플리케이션 로드/저장 경로의 하위 디렉토리("비디오")에 저장됩니다.


설정 항목들은 다음과 같습니다:
- 파일 자동 삭제: 이 옵션을 선택하면 지정된 저장용량을 사용하면 파일이 자동으로 삭제됩니다.
- 최대 저장용량: 동영상 파일이 자동 삭제되기 전의 최대 동영상 파일 저장용량입니다.
- 동영상 파일 형식: 저장된 동영상 녹화를 위한 파일 형식: mkv, mov, mp4.
브랜드 이미지
이 설정은 실내/실외 색 구성표에 사용되는 브랜드 이미지를 지정합니다.
도구 모음의 오른쪽 상단 모서리에 있는 연결된 자동 조종 장치의 아이콘 대신 브랜드 이미지가 표시됩니다. 회사 로고/브랜딩이 포함된 화면/동영상 캡처를 사용자가 쉽게 생성할 수 있습니다.

설정 항목들은 다음과 같습니다: