모터 설정 (ArduSub)
ArduSub가 제대로 작동하려면 모터가 올바르게 설정되어야 합니다.
ROV를 방금 조립했다면 먼저 수동 테스트 섹션에서 추진기가 올바른 출력에 연결되었는 지 확인하십시오. 각 슬라이더를 드래그하여 표시된 프레임에 따라 올바른 모터가 회전하는 지 확인합니다.
추진기가 적절한 출력에 연결되면, 자동 방향 감지(ArduSub 4.0에서 권장) 또는 수동 테스트로 정확한 방향(정방향/역방향)을 확인할 수 있습니다.
수동 테스트
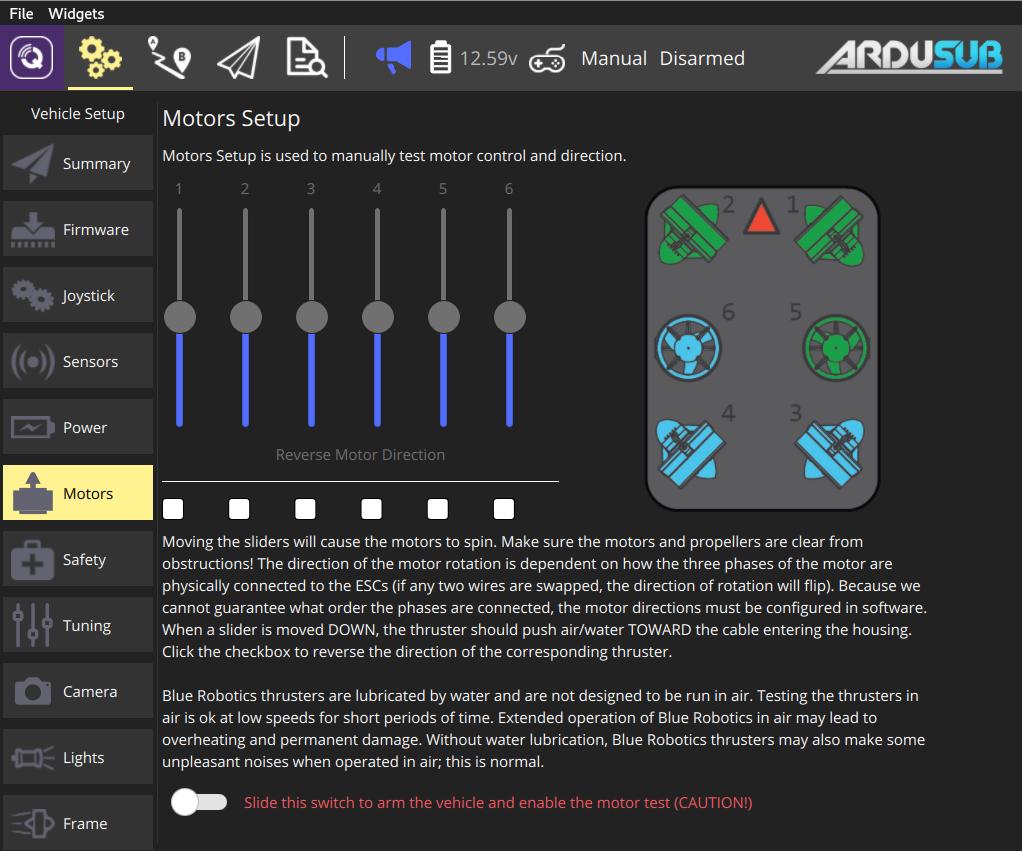
ArduSub 모터 설정에서 각각의 모터를 테스트할 수 있습니다. 슬라이더를 사용하면 각 모터를 정방향 또는 역방향 모드로 회전할 수 있으며, 슬라이더 아래의 확인란을 사용하면 개별 추진기의 작동을 반대로 할 수 있습니다.
오른쪽 이미지는 각 추진기의 위치, 방향 및 현재 사용 중인 프레임을 보여줍니다. 프레임 선택이 차량과 일치하지 않으면, 먼저 프레임 탭에서 올바른 프레임을 선택하십시오.
모터를 수동으로 설정하고 테스트하려면 페이지의 지침을 읽고 따르십시오.
WARNING
스위치를 밀어 차량을 무장시키고 테스트를 활성화하기 전에 모터와 프로펠러에 장애물이 없는 지 확인하십시오!
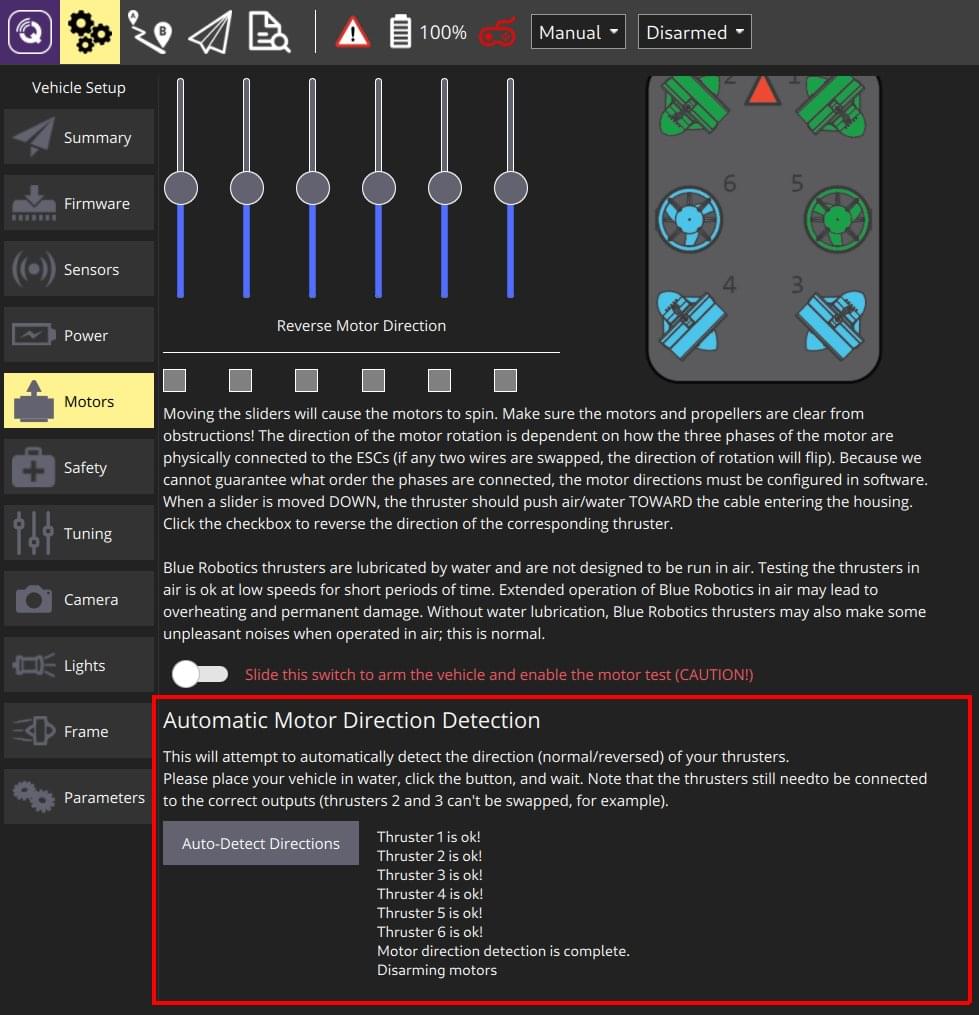
자동 방향 감지
Ardusub 4.0 이상 버전에서는 모터 방향의 자동 감지를 지원합니다. 이것은 각 모터에 펄스를 적용하고 프레임이 예상대로 반응하는 지 확인하고 필요한 경우 모터를 반대로 하여 작동합니다. 이 과정은 약 1분 정도 걸립니다.
자동 모터 방향 감지를 수행하려면 차량 설정->모터 탭으로 이동하여 자동 감지 방향 버튼을 클릭하고 기다립니다. 프로세스에 대한 추가 출력은 실행될 때 버튼 옆에 표시됩니다.
WARNING
이 절차를 수행하려면 프레임 보기에 표시된 대로 모터가 올바른 출력에 연결되어 있어야 합니다!