탐사 (패턴 계획)
탐사 기능으로 다각형 영역에 그리드 비행 패턴을 생성할 수 있습니다. 임의의 다각형, 그리드의 각도 및 기타 속성, 지오태깅된 이미지 생성에 적합한 카메라 설정을 지정할 수 있습니다.
WARNING
조사 지역에 고도 변화가 심한 경우 지형 추적을 활성화하는 것이 좋습니다.
카메라 사양을 사용하여 측량을 계획할 때 측량 영역 아래의 지면은 평평한 것으로 가정합니다. 즉, 이륙 홈 위치와 동일한 고도에 있습니다. 측량 아래의 지면 고도가 홈 위치보다 높거나 낮으면, 이미지의 효과적인 중첩이 계산된 것보다 (각각) 더 적거나 많을 것입니다. 조사 지역 아래의 지상 고도가 홈 위치보다 상당히 높으면 차량이 지상 장애물로 날아가도록 하는 잘못된 임무 경로를 계획할 수 있습니다.
지형 추적을 사용하면 측량이 지형 위의 원하는 고도와 더 가깝게 일치하도록 하고 지면 수준에 너무 가까운 임무를 계획할 가능성을 줄입니다.
탐사 생성
탐사를 생성하려면:
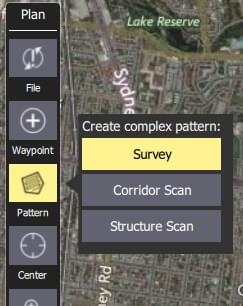
- 계획 뷰에서 계획 도구를 엽니다.
- 계획 도구에서 패턴 도구를 선택한 다음 탐사를 선택합니다.
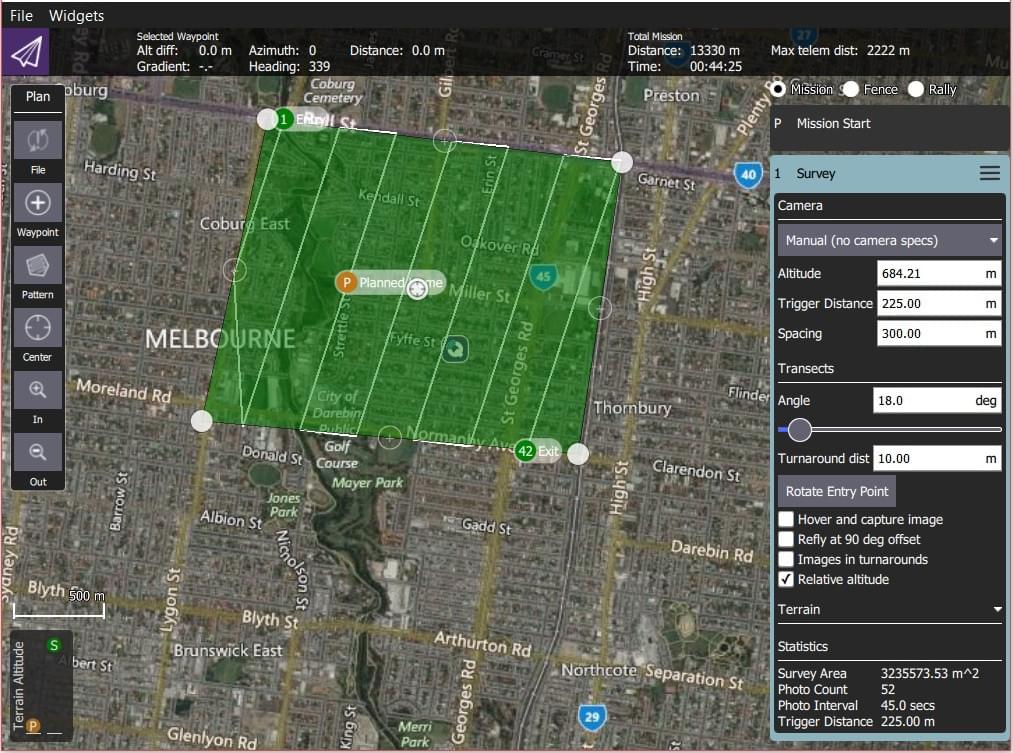
그러면 지도에 설문조사 그리드가 추가되고 임무 목록(오른쪽)에 설문조사 항목이 추가됩니다.
지도에서 정점을 끌어 다각형의 모양을 변경합니다.
기존 정점 사이의
(+)기호를 클릭하여 새 정점을 만듭니다. 그런 다음 새 정점을 새 위치로 끌어서 수정할 수 있습니다.
탐사에 관련된 설정은 다음 섹션에서 설명합니다.
설정
설문조사는 연결된 미션 항목(플랜 보기의 오른쪽에 있는 미션 항목 목록)에서 추가하여 설정할 수 있습니다.
카메라
카메라 트리거 동작은 카메라/카메라 설정에 따라 차이가 납니다. 기존 카메라, 사용자 지정 카메라를 선택하거나 수동으로 설정을 입력할 수 있습니다. 사용 가능한 카메라(QGC 3.4) 목록은 아래와 같습니다.
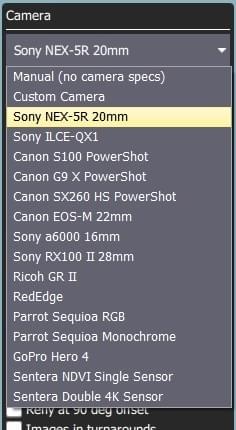
알려진 카메라
드롭다운 옵션에서 알려진 카메라를 선택하면 카메라 기능을 기반으로 격자 패턴이 생성됩니다.
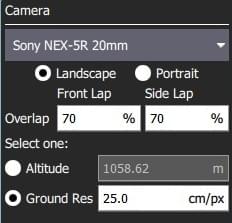
설정 옵션을 사용하여 설문조사에 대한 기본 설정을 조정할 수 있습니다.
- 가로/세로 - 차량의 "정상" 방향을 기준으로 한 카메라 방향입니다.
- 겹침 - 각 이미지 캡처 간에 겹칩니다. 그리드 라인을 따라 비행하거나 그리드 라인을 가로 질러 비행할 때 별도로 설정할 수 있습니다.
- 하나를 선택하십시오:
- 고도 - 조사 고도(지상 해상도가 이 고도에 대해 계산/표시됨).
- 지상 해상도 - 각 이미지의 지상 해상도(해상도를 계산하고 표시하는 데 필요한 고도).
카메라 최적화
사용자 정의 카메라 옵션을 선택하면 알려진 카메라와 유사한 방식으로 새 카메라에 대한 설정을 지정할 수 있습니다.
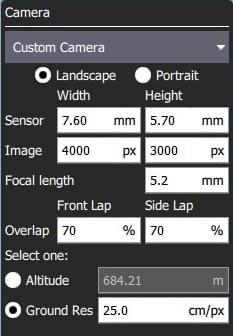
카메라별 설정은 다음과 같습니다.
- 센서 너비/높이 - 카메라의 이미지 센서 크기입니다.
- 이미지 너비/높이 - 카메라가 캡처한 이미지의 해상도입니다.
- 초점 거리 - 카메라 렌즈의 초점 거리입니다.
나머지 설정은 알려진 카메라와 동일합니다.
수동 카메라
수동 카메라 옵션을 사용하여 측량 높이, 트리거 간격 및 카메라에 적합한 격자 간격을 지정할 수 있습니다.
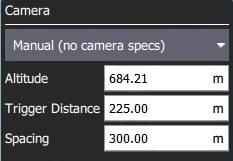
설정 옵션은 다음과 같습니다:
- 고도 - 전체 그리드를 비행하기 위한 측량 고도입니다.
- 트리거 거리 - 각 카메라 샷 사이의 지상 거리입니다.
- 간격 - 복도를 가로지르는 인접한 그리드(비행 경로) 선 사이의 거리입니다.
횡단
횡단 섹션은 사용된 카메라와 독립적인 그리드를 설정합니다.
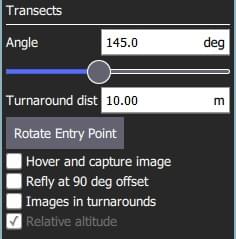
설정 옵션은 다음과 같습니다:
- 각도 - 북쪽을 기준으로 한 그리드 선의 각도입니다.

- 회전 거리 - 차량 회전을 위해 조사 영역 외부에 추가할 추가 거리의 양입니다.
- 진입점 회전 - 버튼을 눌러 설문조사의 시작점과 끝점을 변경합니다.
- 마우스를 가져가서 이미지 캡처 - 마우스를 가져가서 이미지를 캡처합니다(멀티콥터만 해당).
- 90도 오프셋으로 비행 - 전체 임무를 90도 오프셋으로 되돌립니다.

- 회전 중인 이미지 - 회전시 이미지를 촬영합니다.
- 상대 고도 - 홈을 기준으로 지정된 고도를 지정하려면 선택합니다(선택하지 않은 경우 AMSL임).
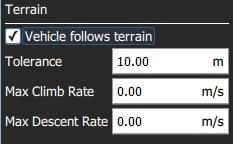
지형
기본적으로 비행 차량은 고정 고도에서 측량 경로를 따릅니다. 지형 추적을 활성화하면 차량이 지면에 대해 일정한 고도를 유지합니다.
INFO
지형 추적은 AirMap 서버에서 쿼리한 지형 높이를 사용합니다.
설정 옵션은 다음과 같습니다:
- 기체 지형 추적 - 지형 추적을 활성화하려면 선택합니다(및 다음 옵션 표시).
- 허용 오차 - 목표 고도에서 허용되는 고도 편차입니다.
- 최대 상승률 - 지형을 따라갈 때의 최대 상승률입니다.
- 최대 하강 속도 - 지형을 따라갈 때의 최대 하강 속도.
통계
통계 섹션에는 계산된 조사 영역, 사진 간격, 사진 간격 및 계획된 사진 수가 표시됩니다.