Plan View - Rally Points
Rally Points are alternative landing or loiter locations. They are typically used to provide a safer or more convenient (e.g. closer) destination than the home position in Return/RTL mode.
INFO
Rally Points are only supported by ArduPilot on Rover 3.6 and Copter 3.7 (or higher). PX4 support is planned in PX4 v1.10 timeframes. It also requires usage of a Daily build or Stable 3.6 (once available). QGroundControl will not display the Rally Point options if they are not supported by the connected vehicle.

Rally Point Usage
To create Rally Points:
- Navigate to the Plan View
- Select the Rally radio button above the Mission Command List
- Click the map wherever you want rally points.
- An R marker is added for each
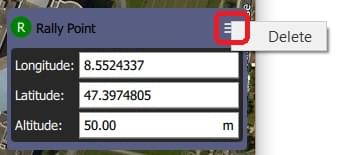
- the currently active marker has a different colour (green) and can be edited using the Rally Point panel.
- Make any rally point active by selecting it on the map:
- Move the active rally point by either dragging it on the map or editing the position in the panel.
- Delete the active rally point by selecting the menu option on the Rally Point panel
Upload Rally Points
Rally points are uploaded in the same way as a mission, using File in the Plan tools.
Remaining tools
The rest of the tools work exactly as they do while editing a Mission.