ArduCopter 튜닝
튜닝 기초
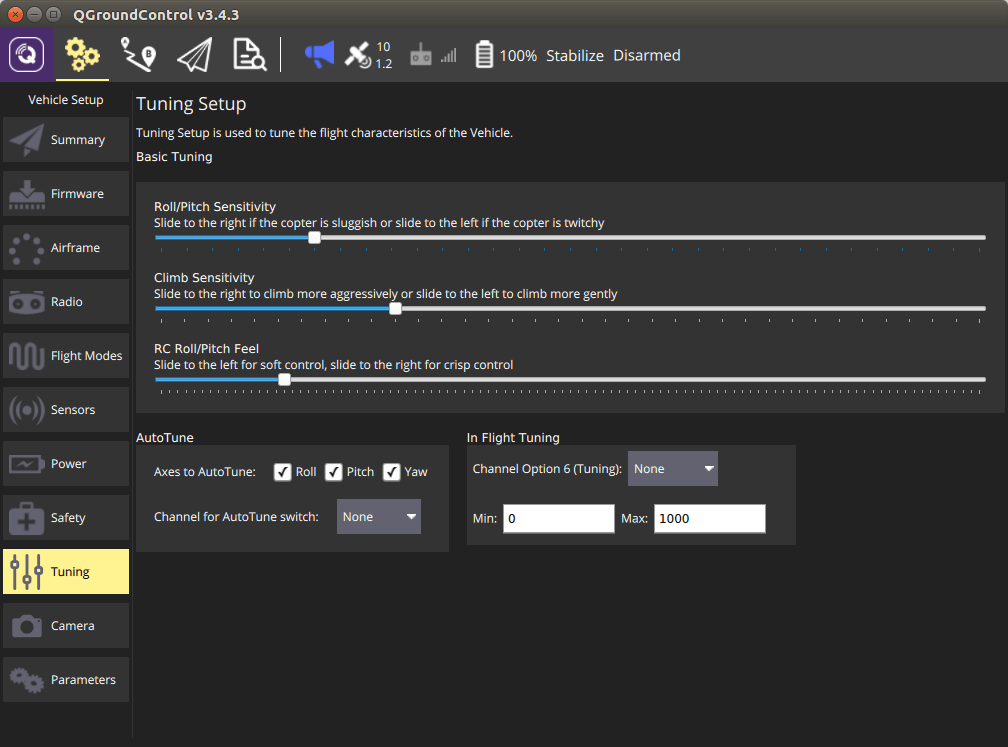
원하는 슬라이더를 왼쪽이나 오른쪽으로 이동하여 비행 특성을 설정합니다.
자동 튜닝
자동 튜닝 기능은 큰 오버슈트 없이 최고의 응답을 제공하기 위한 속도 매개변수를 자동으로 조정합니다.
자동 튜닝 수행:
- 튜닝할 축을 선택합니다. > 도움말 모든 축을 한 번에 조정하려면 상당한 시간이 소요되어 배터리가 부족할 수 있습니다. 이를 방지하려면 한 번에 하나의 축만 조종하는 것이 좋습니다.
- 송신기 스위치 중 하나에 자동튜닝을 할당합니다. 이륙하기 전에 스위치가 낮은 위치에 있는 지 확인하십시오.
- 이륙하여 콥터를 AltHold에 넣습니다.
- 송신기 스위치로 자동튜닝 기능을 켭니다.
- 콥터는 몇 분 동안 지정된 축 주위를 경련합니다.
- 자동 튜닝이 완료되면 헬리콥터는 원래 설정으로 다시 변경됩니다.
- 자동튜닝 스위치를 다시 낮은 위치로 이동한 다음 다시 높음으로 이동하여 새 설정을 테스트합니다.
- 자동 튜닝 스위치를 낮은 위치로 이동하여 이전 설정을 테스트합니다.
- 새 설정을 저장하려면 자동 튜닝 스위치가 높은 위치에 있는 동안 착륙 및 해제하십시오.
참고:
- 자동 튜닝은 AltHold에서 수행되므로 콥터에는 AltHold에서 최소한으로 비행할 수 있는 튜닝이 되어있어야 합니다. 자동 튜닝 스위치를 다시 낮은 위치로 이동하여 언제든지 자동 튜닝을 취소할 수 있습니다.
- 자동 튜닝 실행중 언제든지 송신기를 사용하여 멀티콥터의 위치를 변경할 수 있습니다.
비행중 튜닝
이것은 송신기 다이얼 채널 중 하나를 사용하여 비행 제어 매개변수를 조정할 수 있는 고급 옵션입니다. 드롭다운에서 제어 옵션을 선택하고 다이얼에 할당할 값의 최소/최대를 지정합니다.