Safety Setup (ArduPilot)
The Safety Setup page allows you to configure (vehicle specific) failsafe settings.
TIP
The setup page covers the most important safety options; other failsafe settings can be set via the parameters described in the failsafe documentation for each vehicle type.
INFO
QGroundControl does not support polygon fences or rally points on ArduPilot.
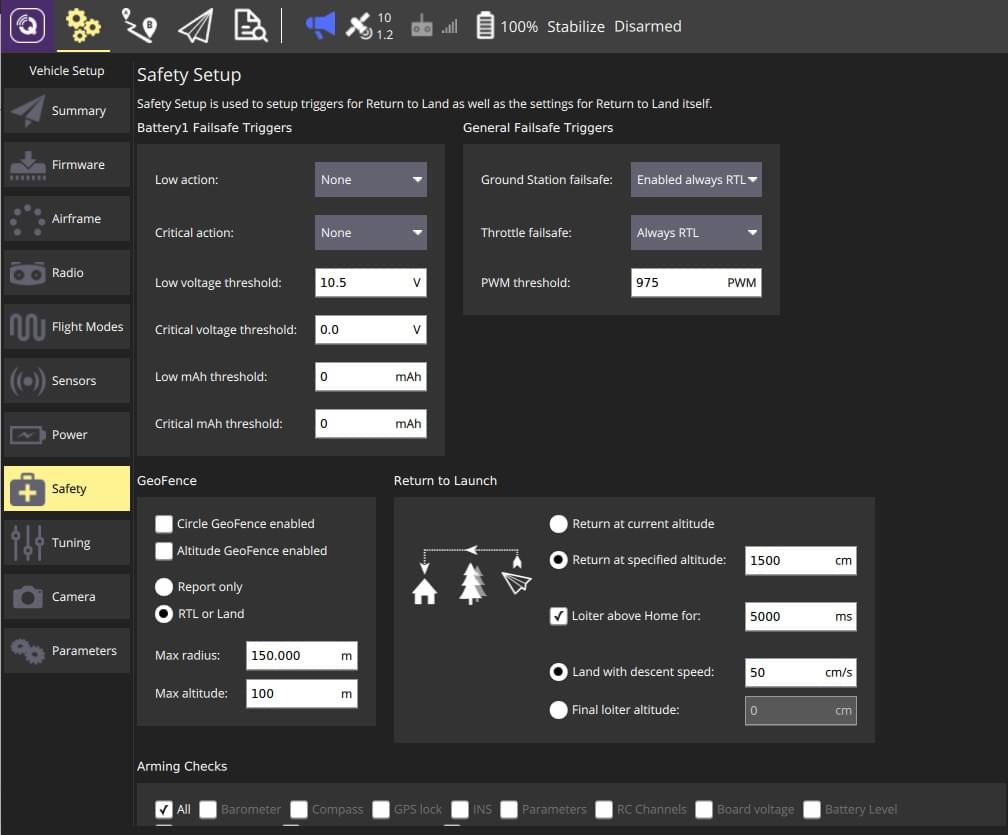
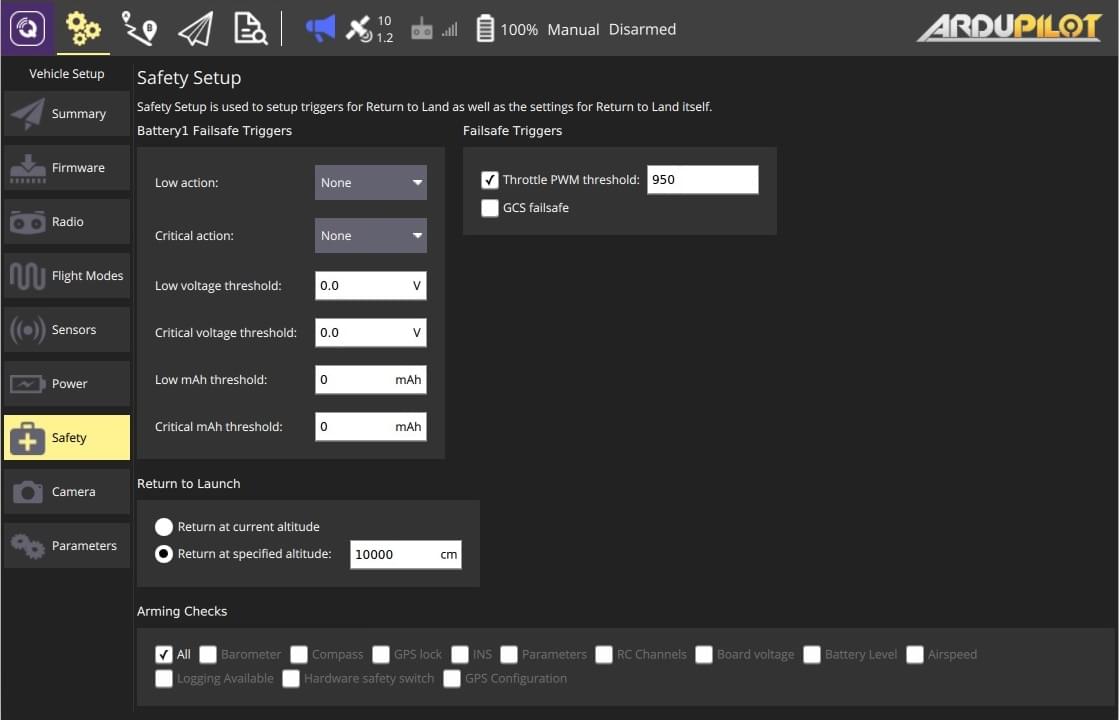
Copter
The Copter safety page is shown below.
INFO
For additional safety settings and information see: Failsafe.
Battery Failsafe
This panel sets the Battery Failsafe parameters. You can set low and critical thresholds for voltage and/or remaining capacity and define the action if the failsafe value is breached. The thresholds can be disabled by setting them to zero.
TIP
If there is a second battery (enabled in the Power Setup) a second panel will be displayed with the same settings.
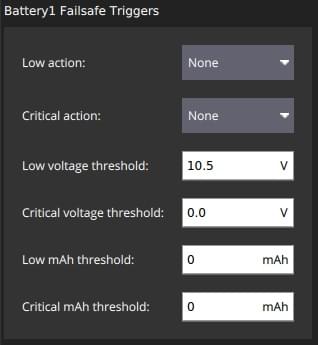
The configuration options are:
- Low action (BATT_FS_LOW_ACT) - Select one of: None, Land, RTL, SmartRTL, SmartRTL or Land, Terminate.
- Critical action (BATT_FS_CRT_ACT) - Select one of: None, Land, RTL, SmartRTL, SmartRTL or Land, Terminate.
- Low voltage threshold (BATT_LOW_VOLT) - Battery voltage that triggers the low action.
- Critical voltage threshold (BATT_CRT_VOLT)- Battery voltage that triggers the critical action.
- Low mAh threshold (BATT_LOW_MAH) - Battery capacity that triggers the low action.
- Critical mAh threshold (BATT_CRT_MAH) - Battery capacity that triggers the critical action.
General Failsafe Triggers
This panel enables the GCS Failsafe and enables/configures the throttle failsafe.
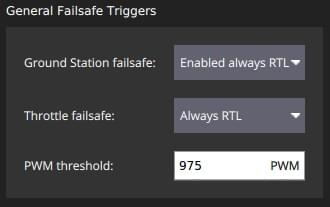
The configuration options are:
- Ground Station failsafe - Disabled, Enabled always RTL, Enabled Continue with Mission in Auto Mode, Enabled Always SmartRTL or RTL, Enabled Always SmartRTL or Land.
- Throttle failsafe - Disabled, Always RTL, Continue with Mission in Auto Mode, Always land.
- PWM Threshold (FS_THR_VALUE) - PWM value below which throttle failsafe triggers.
Geofence
This panel sets the parameters for the cylindrical Simple Geofence. You can set whether the fence radius or height are enabled, the maximum values for causing a breach, and the action in the event of a breach.
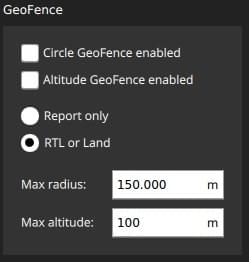
The configuration options are:
- Circle GeoFence enabled (FENCE_TYPE, FENCE_ENABLE) - Enable the circular geofence.
- Altitude GeoFence enabled (FENCE_TYPE, FENCE_ENABLE) - Enable altitude geofence.
- Fence action (FENCE_ACTION) One of:
- Report only - Report fence breach.
- RTL or Land - RTL or land on fence breach.
- Max radius (FENCE_RADIUS) - Circular fence radius that when broken causes RTL.
- Max altitude (FENCE_ALT_MAX)- Fence maximum altitude to trigger altitude geofence.
Return to Launch
This panel sets the RTL Mode behaviour.
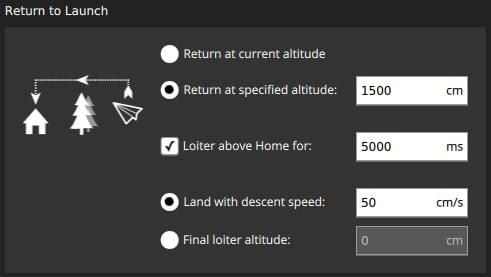
The configuration options are:
- Select RTL return altitude (RTL_ALT):
- Return at current altitude - Return at current altitude.
- Return at specified altitude - Ascend to specified altitude to return if below current altitude.
- Loiter above home for (RTL_LOIT_TIME) - Check to set a loiter time before landing.
- One of
- Land with descent speed (LAND_SPEED) - Select final descent speed.
- Final loiter altitude (RTL_ALT_FINAL) - Select and set final altitude for landing after RTL or mission (set to 0 to land).
Arming Checks
This panel sets which Pre-ARM Safety Checks are enabled.

The configuration options are:
- Arming Checks to perform (ARMING_CHECK) - Check all appropriate: Barometer, Compass, GPS lock, INS, Parameters, RC Channels, Board voltage, Battery Level, Airspeed, Logging Available, Hardware safety switch, GPS Configuration, System.
Plane
The Plane safety page is shown below.
INFO
For additional safety settings and information see: Plane Failsafe Function and Advanced Failsafe Configuration.
Battery Failsafe
The plane battery failsafe is the same as for copter except there are different options for the Low and Critical actions: None, RTL, Land, Terminate.
For more information see: battery failsafe (copter).
Failsafe Triggers
This panel enables the GCS Failsafe and enables/configures the throttle failsafe.

The configuration options are:
- Throttle PWM threshold (THR_FS_VALUE) - PWM value below which throttle failsafe triggers.
- GCS failsafe (FS_GCS_ENABL) - Check to enable GCS failsafe.
Return to Launch
This panel sets the RTL Mode behaviour.
The configuration options are:
- Select RTL return altitude (RTL_ALT):
- Return at current altitude - Return at current altitude.
- Return at specified altitude - Ascend to specified altitude to return if below current altitude.
Arming Checks
Arming Checks are the same as for copter.
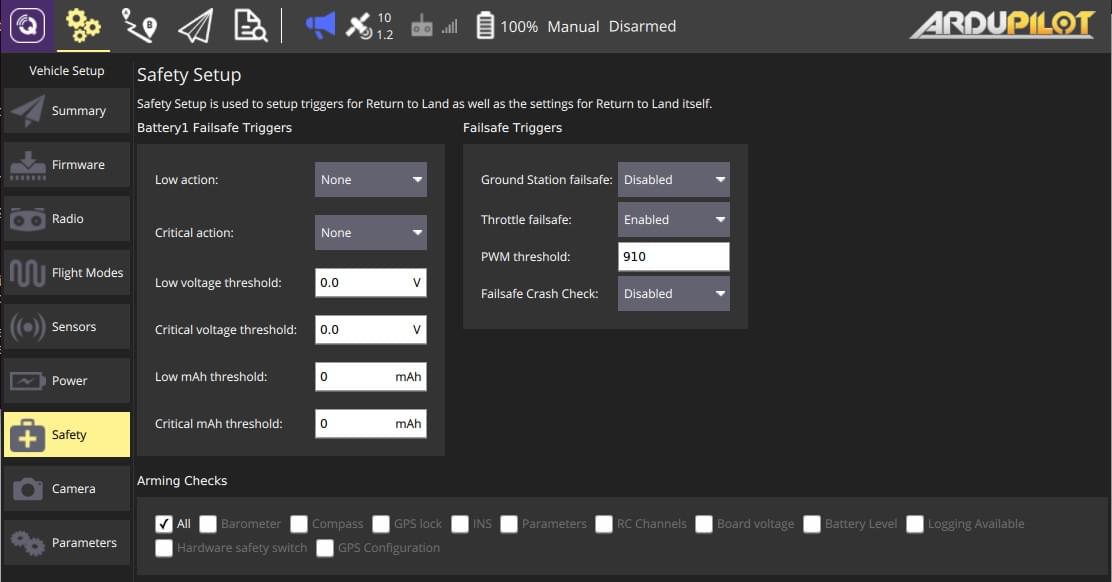
Rover
The Rover safety page is shown below.
INFO
For additional safety settings and information see: Failsafes.
Battery Failsafe
The rover battery failsafe is the same as for copter.
Failsafe Triggers
This panel enables the rover Failsafes.
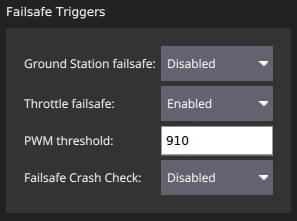
The configuration options are:
- Ground Station failsafe (FS_GCS_ENABL) - Check to enable GCS failsafe.
- Throttle failsafe (FS_THR_ENABLE) - Enable/disable throttle failsafe (value is PWM threshold below).
- PWM threshold (FS_THR_VALUE) - PWM value below which throttle failsafe triggers.
- Failsafe Crash Check (FS_CRASH_CHECK) - What to do in the event of a crash: Disabled, Hold, HoldAndDisarm
Arming Checks
Arming Checks are the same as for copter.
Sub
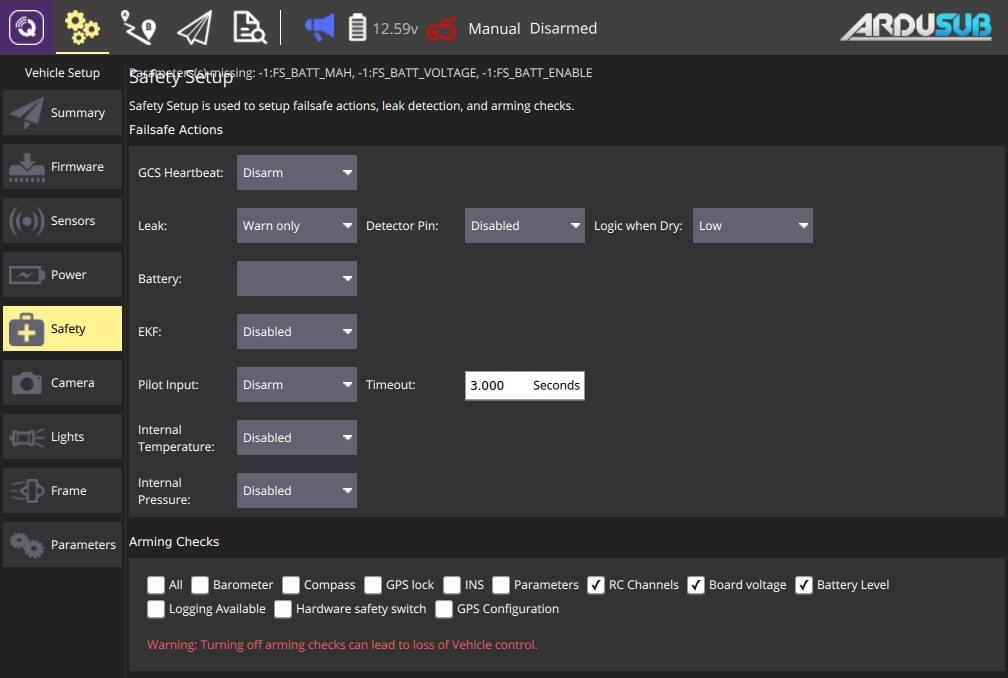
The Sub safety page is shown below.
INFO
For additional safety settings and information see: Failsafes.
Failsafe Actions
The configuration options are:
- GCS Heartbeat - Select one of: Disabled, Warn only, Disarm, Enter depth hold mode, Enter surface mode.
- Leak - Select one of: Disabled, Warn only, Enter surface mode.
- Detector Pin - Select one of: Disabled, Pixhawk Aux (1-6), Pixhawk 3.3ADC(1-2), Pixhawk 6.6ADC.
- Logic when Dry - Select one of: Low, High.
- Battery - ?.
- EKF - Select one of: Disabled, Warn only, Disarm.
- Pilot Input - Select one of: Disabled, Warn only, Disarm.
- Internal Temperature - Select one of: Disabled, Warn only.
- Internal Pressure - Select one of: Disabled, Warn only.
Arming Checks
Arming Checks are the same as for copter.