Loading Firmware
QGroundControl desktop versions can install PX4 Pro or ArduPilot firmware onto Pixhawk-family flight-controller boards. By default QGC will install the current stable version of the selected autopilot, but you can also choose to install beta builds, daily builds, or custom firmware files.
QGroundControl can also install the firmware for SiK Radios and PX4 Flow devices.
Caution Loading Firmware is currently not available on tablet or phone versions of QGroundControl.
Connect Device for Firmware Update
Caution Before you start installing Firmware all USB connections to your vehicle must be disconnected (both direct or through a telemetry radio). The vehicle must not be powered by a battery.
First select the Gear icon (Vehicle Setup) in the top toolbar and then Firmware in the sidebar.
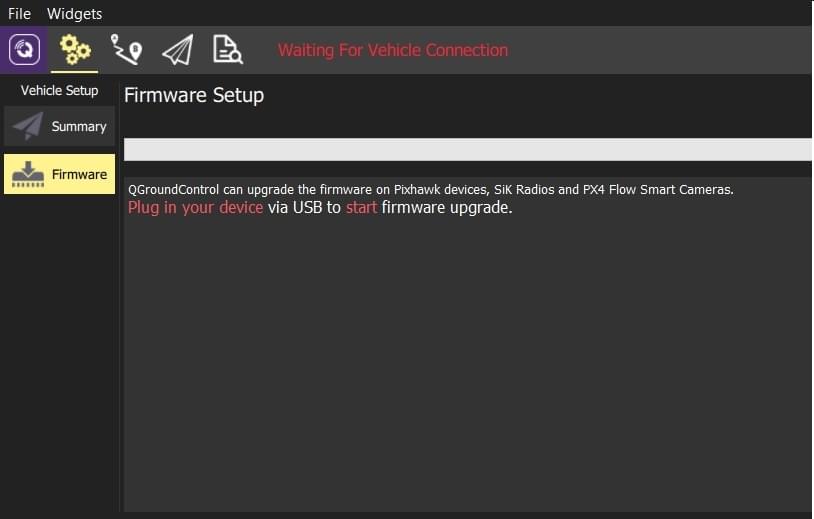
Connect your device (Pixhawk, SiK Radio, PX4 Flow) directly to your computer via USB.
INFO
Connect directly to a powered USB port on your machine (do not connect through a USB hub).
Select Firmware to Load
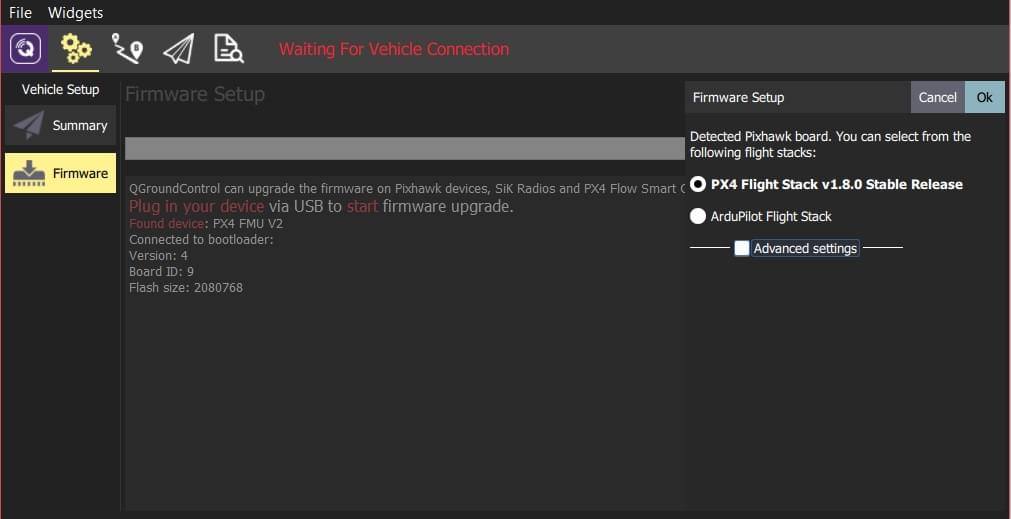
Once the device is connected you can choose which firmware to load (QGroundControl presents sensible options based on the connected hardware).
For a Pixhawk-compatible board choose either PX4 Flight Stack vX.X.X Stable Release or ArduPilot Flight Stack radio buttons to download the current stable release.
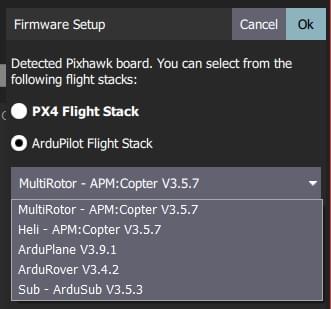
If you select ArduPilot you will also have to choose the specific firmware and the type of vehicle (as shown below).
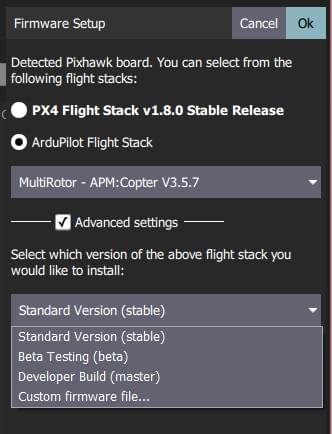
Check Advanced settings to select specific developer releases or install firmware from your local file system.
Update the firmware
Click the OK button to start the update.
The firmware will then proceed through a number of upgrade steps (downloading new firmware, erasing old firmware etc.). Each step is printed to the screen and overall progress is displayed on a progress bar.
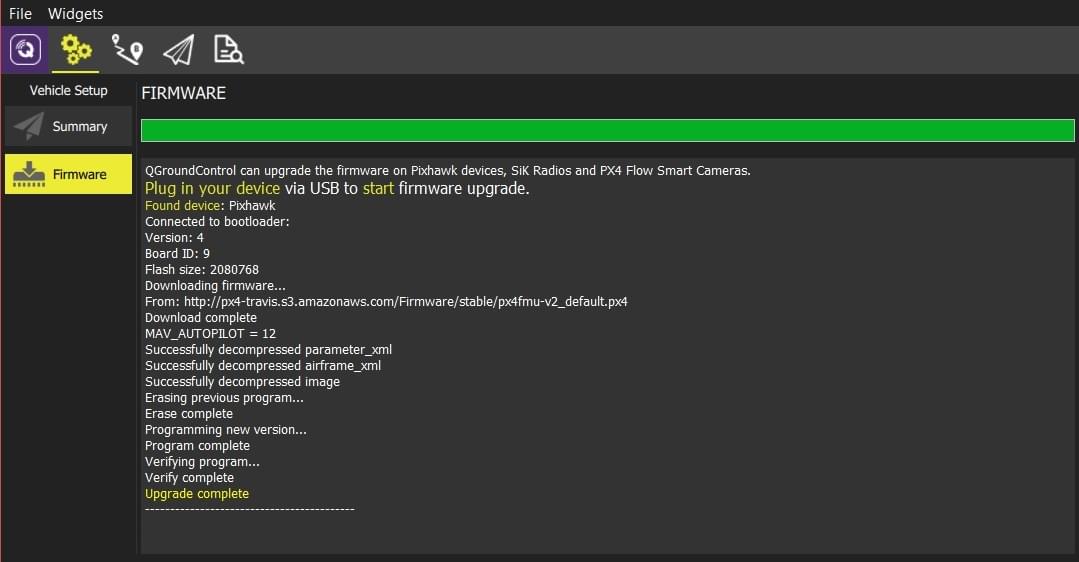
Once the firmware has finished loading the device/vehicle will reboot and reconnect. Next you will need to configure the airframe (and then sensors, radio, etc.)